《临近空间高超声速飞行器发展研究》_笔记
临近空间高超声速飞行器发展研究_笔记
[TOC]
概述:
本书共分7章,第1章从全局上介绍国外临近空间高超声速飞行器的发展概况。第2章到第6章分别介绍美国、俄罗斯、日本、欧洲等其他国家和地区的临近空间高超声速飞行器的发展现状。第7章对本书的研究内容进行总结,对未来国外临近空间高超声速飞行器的发展趋势进行分析。
第1章 国外临近空间高超声速飞行器发展概况
1.1发展历史
20世纪20~30年代,人类提出高超声速技术发展概念。
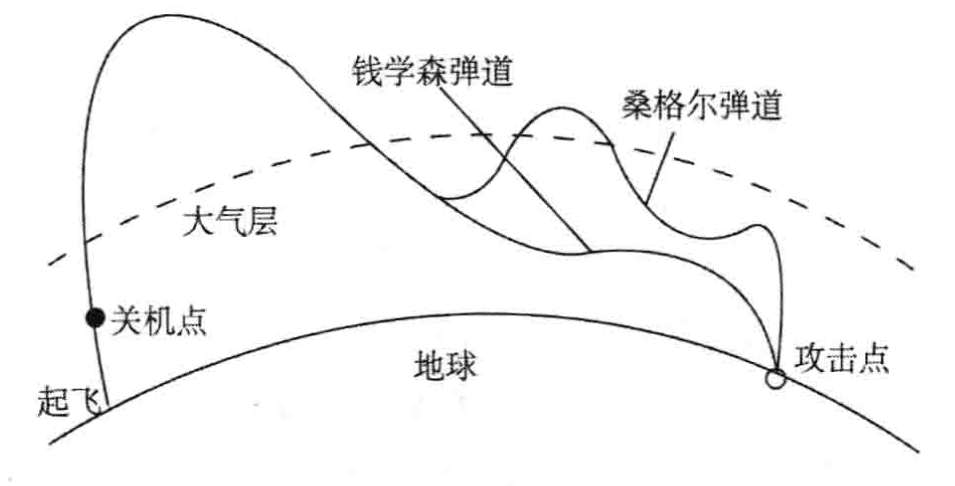
首次提出概念式设计:1938年奥地利科学家欧根·桑格尔首次提出临近空间助推滑翔飞行器研究方案,并于1944年发表了长篇报告《火箭助推远程轰炸机》,设计了第一种理想的高超声速飞行器方案,即“银鸟”火箭助推环球轰炸机模型。
美国最早提出的高超声速飞行器设计方案于1949年由钱学森提出。
两者差距:
桑格尔的飞行器采用一种具有一定跳跃、波动幅度的滑翔轨迹,称为再入跳跃滑翔弹道;
而钱学森的火箭飞机采用几乎没有波动的平坦滑翔下降轨迹,称为再入平坦滑翔弹道。
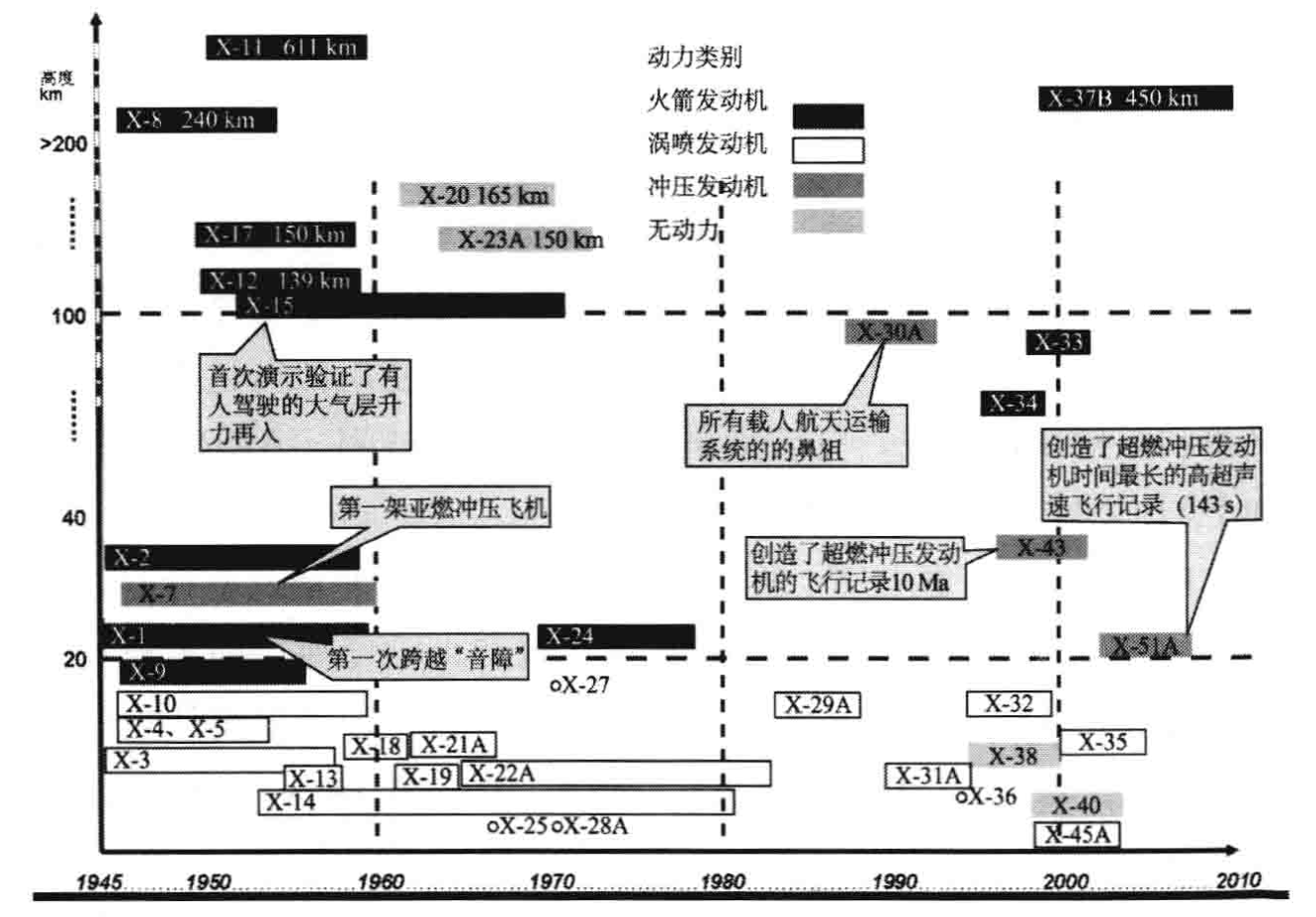
美国X系列试验样机,先后创造了多项人类飞行史上的记录。
1.2各国临近空间高超声速飞行器发展现状
1.2.1美国
第一次使用的高超声速导弹为突破口,进而到重复使用的高超声速军用飞机和天地往返系统,先后提出了Hyper-X计划、ARRMD计划和FALCON计划。
FALCON (Force Application and Launch from the Continental)全称为从美国本土运送和应用兵力计划,也称猎鹰计划。
1.2.2俄罗斯
在高空飞行试验中,最先实现超声速燃烧,促进了高超声速技术应用研究的发展。
俄罗斯高超声速计划的主要研究内容包括:
- 以高超声速巡航导弹为背景,发展小型飞行器;
- 以液氢作燃料的双模态超燃冲压发动机;
- 运载器多用老旧导弹型号改装而成,经济实用,有助于将主要精力和时间用于研制超燃冲压发动机。
俄罗斯四大重要飞行试验计划:
- 冷计划,率先实现冲压发动机超声速燃烧
- 针(IGLA)计划,高超声速导弹研究
- 针31计划,
- 彩虹-D2计划。
1.2.3欧洲
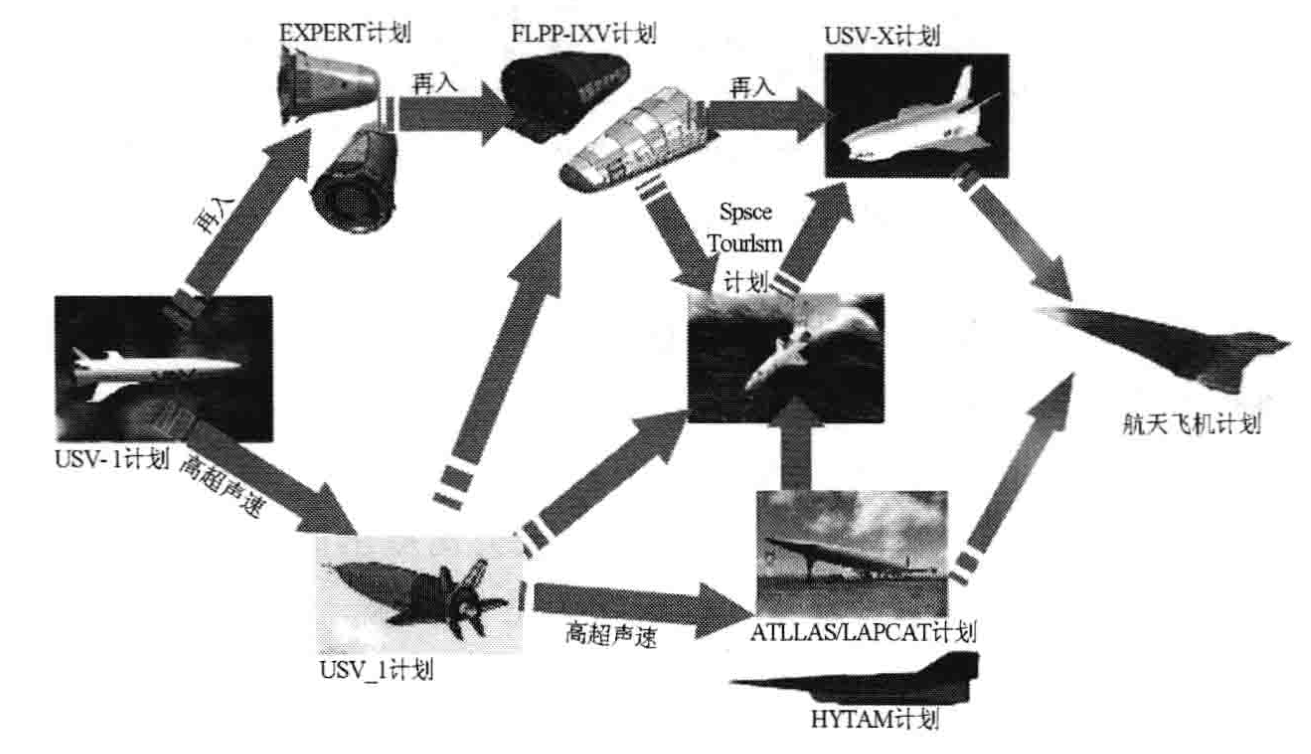
Skylon计划:吸气式动力装置,单级入轨的可重复使用空天飞机计划
桑格尔空天飞机计划:德国提出的两级入轨空天飞机概念。
高速导弹计划:探索高超声速技术用于近程和极近程防空导弹的可行性。
高超声速组合式发动机应用研究计划:用于验证空气动力学计算模型(包括发动机前部远场、进气道、燃烧室、喷管、超声速燃烧的建模并进行计算)。
国家高超声速研究与技术计划:重点在氢燃料高超声速发动机技术,涉及计算流体力学(CFD)、材料、飞行器系统和试验设备的研究。
欧洲各国对超高声速飞行器的研究包括但不仅限于以上这些项目。
1.2.4其他国家
**日本:**起步虽晚,进展很快。
曾一直致力于两级可重复使用天地往返运输系统(TSTO)的研究。
印度:
近年来,印度政府提出了多项高超声速飞行计划,包括太空舱回收试验(SRE)、可重复使用运载器(RLV),超燃冲压发动机飞行试验和高超声速技术验证器(HSTDV)计划。
可以实现发动机持续7s的6Ma飞行。
HyShot计划:
澳大利亚同美、法、英等国合作开展了HyShot计划。在30km高度、8Ma条件下,模型发动机开始工作,持续大约6s。
1.3临近空间高超声速飞行器发展趋势
以美国X-1飞行器突破音障为标志,人类正式进入了超声速飞行时代
未来,以突破黑障、高速动力、长时间防隔热及主动热管理等技术为标志,人类将跨入临近空间高超声速飞行的时代。
飞行器根据功能可以构建三类飞行平台:
- 快速打击时间敏感性目标的高速临近空间飞行器;
- 全球快速到达的高速临近空间飞行器;
- 以快速进出空间为背景的高速临近空间飞行器。
1.3.1快速打击时间敏感性目标的临近空间高超声速飞行器
主要性能:飞行速度3~10Ma、飞行距离几百至几千千米、飞行高度 20~30km
发展目标为:形成对时间敏感性目标进行打击的高速武器或武器平台。
飞行器包括:动力巡航、助推滑翔
动力巡航类飞行器发展瓶颈是高效吸气式动力,
无动力滑翔类高速飞行器需要突破气动外形、防隔热等关键技术
1.3.2全球快速到达的临近空间高超声速飞行器
主要性能:飞行速度大于10、飞行距离几千至上万千米、飞行高度超过30km。
发展目标:形成高超声速战略武器平台和未来高超声速全球到达的飞行平台。
技术要点:高升阻比气动构型、轻质耐高温材料、热防护、目标更新和自动飞行控制等技术。
全球快速到达的高速临近空间飞行器对技术起点要求更高,目前只有美国和俄罗斯制定了相关的计划。
1.3.3以快速进出空间为背景的临近空间高超声速飞行器一空天飞行器
目标:飞行器地面自主起飞、进出空间、降落和可重复使用。
吸气式水平起飞单级入轨:美国NASP计划,英国的HOTOL计划
火箭动力垂直起飞单级入轨:美国X-33计划
这两种飞行器皆因技术原因而停滞已久。
近年来工程界逐渐认识到,TSTO及可重复使用空天飞行器,将是未来一段时期发展的重点方向。
第2章 美国临近空间高超声速飞行器发展现状
2.1美国临近空间高超声速技术发展历程
美国的高超声速技术发展大致分为四个历史发展阶段:
- 20世纪50~60年代:机理与相关技术探索。该时期末尾,沿着空间轨道机动飞行器、助推滑翔再人飞行器与吸气式高超声速飞行器等几个不同的方向发展
- 20世纪70年代至80年代中期:重点研究机动滑翔再入飞行器,积极发展临近空间助推滑翔技术。
- 20世纪80年代后期至90年代中期:重视发展具有跨大气层进入轨道的吸气式高超声速飞行器。主要围绕国家空天飞机(NASP)计划。
- 20世纪90年代中后期至今:各种机理的跨大气层高超声速飞行器技术计划全面复苏。空间轨道机动飞行器、助推滑翔再入飞行器与吸气式高超声速飞行器涌现。
美国各种技术机理的高超声速飞行器,经过不断发展,目前大致演化为三大类:空间轨道机动飞行器、助推滑翔再人飞行器、吸气式高超声速飞行器。
空间轨道机动飞行器:
X-37B展示了火箭推进的空间轨道机动飞行器技术正在走向成熟
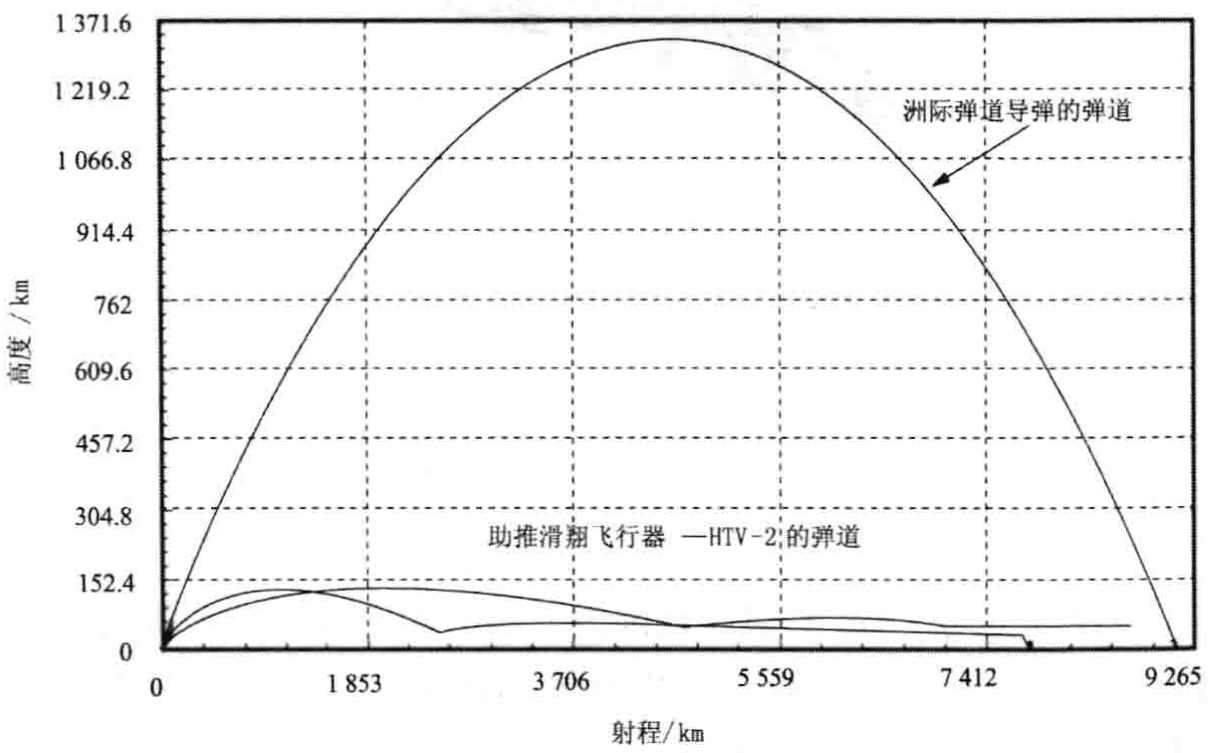
助推滑翔再人飞行器:
而且通过HTV-2两次失败的飞行试验,全面检验了飞行器的气动设计、热防护、制导控制、通信测控等关键技术,发现了其关键技术突破的重大难点。
吸气式高超声速飞行器:
早期主要进行超燃冲压发动机技术探索。
后期,其技术方向演化为高超声速巡航导弹与组合循环动力空天飞机两类。
美国目前发展高超声速巡航导弹技术项目有两大重要项目,分别是美国空军的X-51A(主动冷却超燃冲压发动机推进的高超声速巡航飞行器)、美国海军的HyFly技术验证飞行器(双燃烧室超燃冲压发动机推进的高超声速巡航导弹样弹)。
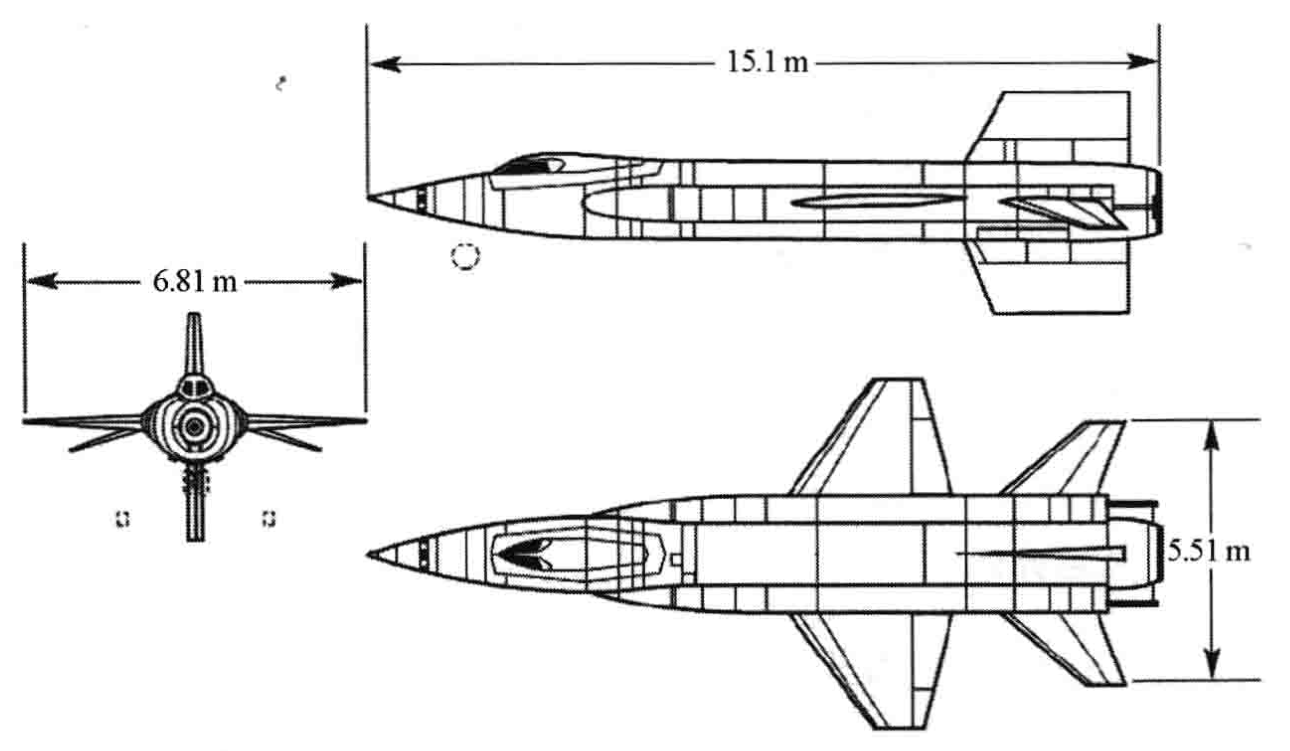
2.2 X-15
在美国航空航天技术发展史上,以火箭为动力的X系列飞行器占据特殊的地位,而X-15飞行器是其中最成功的。
主要目标:
- 验证1954年以来的高超声速理论和风洞技术;
- 研究高气动压力下飞机结构、稳定性和控制性能;
- 研究高温条件下的飞机结构;
- 研究高空助推和再入相关的稳定性和控制问题;
- 研究失重高加速度条件下的生物医学现象。
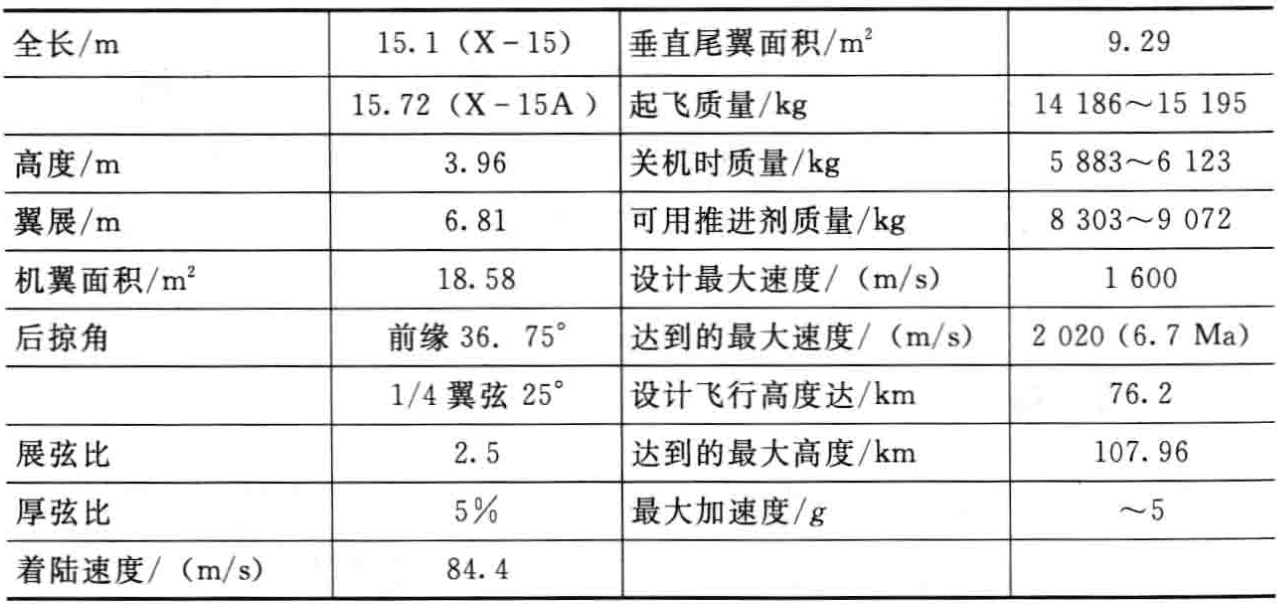
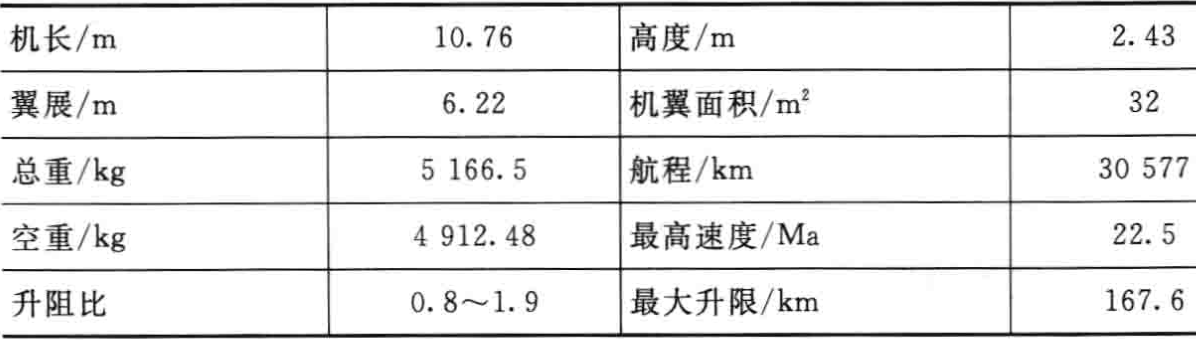
在X-15飞行器所进行的199次试验中,先后创造了6.72 Ma和108000m的速度与升限的世界记录。
关键技术:
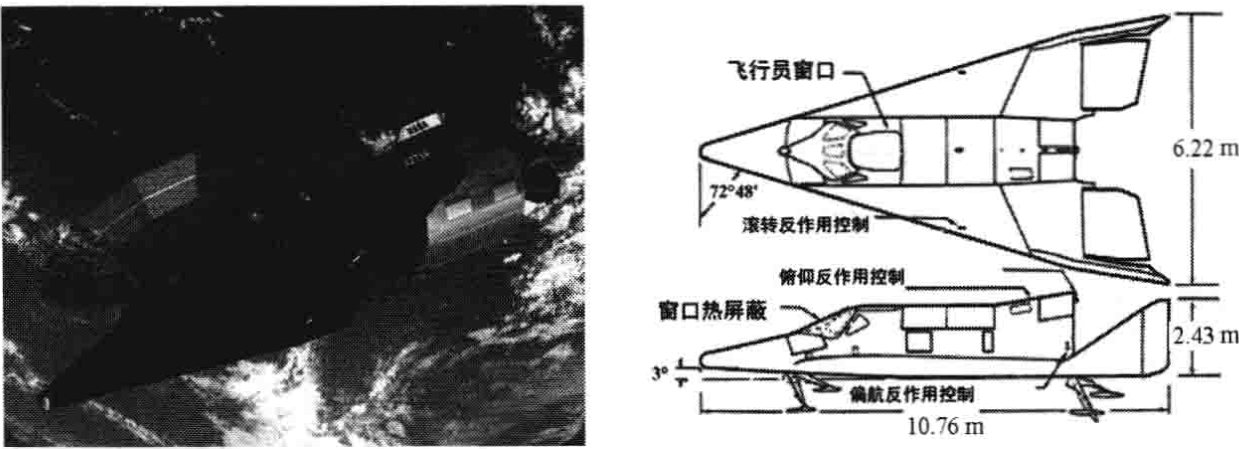
机体结构:属于单翼单座飞机,包括机翼、水平尾翼、垂直尾翼。
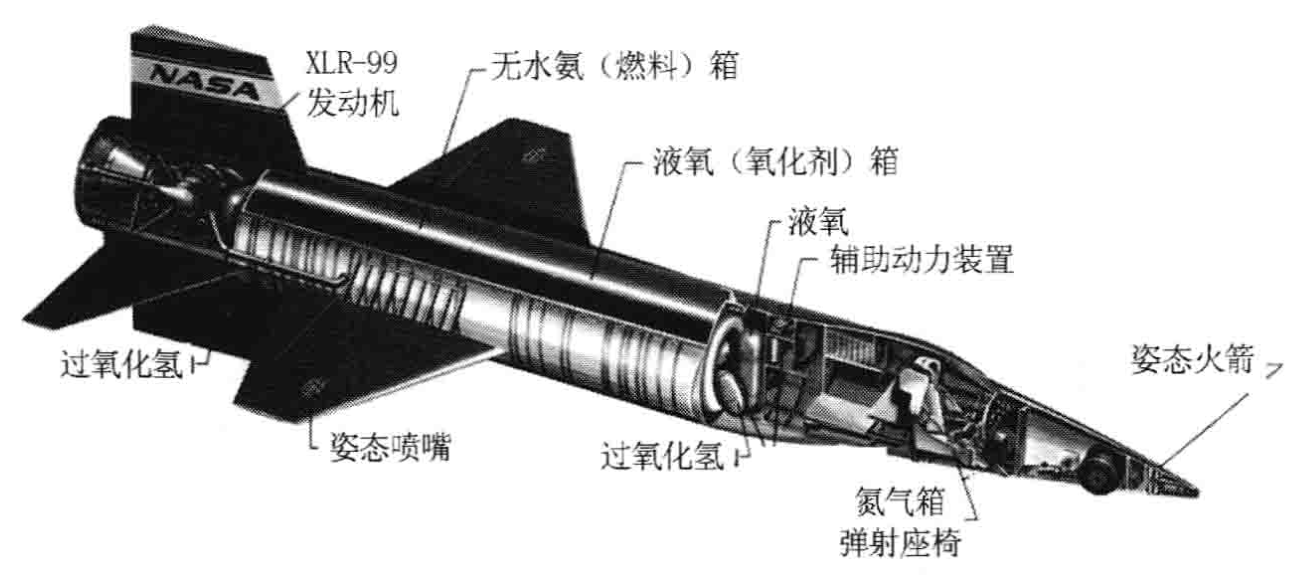
推进系统:采用推力可调的XLR-99型火箭发动机。
控制系统:常规气动控制系统,水平尾翼负责俯仰控制,上下垂尾偏航控制。X-15是在传统气动力控制系统失效的空间边缘最早使用矢量推力控制完成偏航、俯仰和滚转的飞行器。
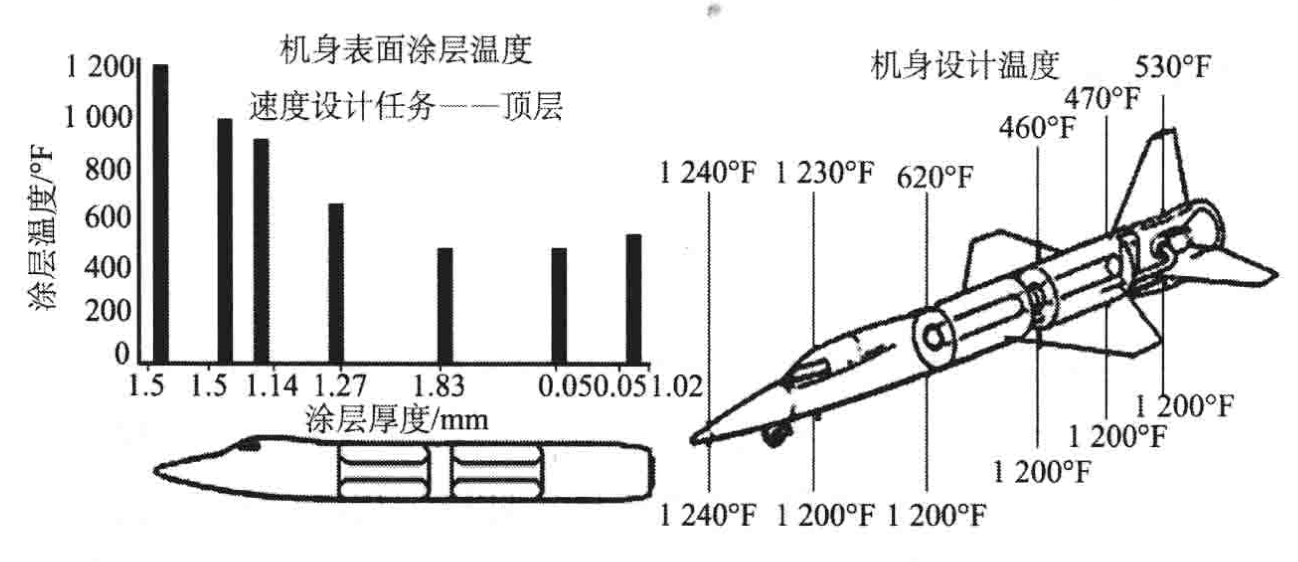
结构、材料和热防护:主要采用Inconel X材料(镍铬铁合金,用于机翼、机翼前缘及机身)和钛铝合金(内部结构)。绝缘技术和冷却技术。
评价:
2.3 X-20
X-20以银鸟为概,由美国空军、国家航空航天局和波音公司共同研制的有人驾驶机动飞行器研究机。
X-20飞行器基本外形为72.48°的直三角翼和平底的组合体机身尾部为斜面,可以在跨声速下提供纵向稳定性。
X-20是第一个对高超声速飞行领域进行深人探索的升力体再入飞行器,并且在以往各种理论研究基础上首架进人初步制造阶段的助推-滑翔飞行器。
X-20气动布局技术创新:
X-20最初构型设计为双楔形上表面和平直下表面以及圆形前缘,这一构型具有很好的高超声速性能并易于加工。最终的构型考虑到了低速性能,对其上表面进行了修改。
其后掠角和前缘半径的设计综合考虑在干扰加热、亚声速升力曲线、跨声速激波失速、超声速舵面铰链力矩产生的影响;
安装尾翼提供稳定性和偏航控制,以实现大攻角高超声速飞行;
充分利用高超声速升力曲线斜率,增加并减小尾翼面积,尾翼角度要在10°以内等。
评价:
X-20项目在高超声速技术的发展史上产生了深刻的影响。波音公司高度评价了其在理论概念的发展和飞行器硬件的实现方面取得的技术进展。
由于超长的风洞试验时间X-20刺激了地面试验和飞行试验设施和理论的发展。
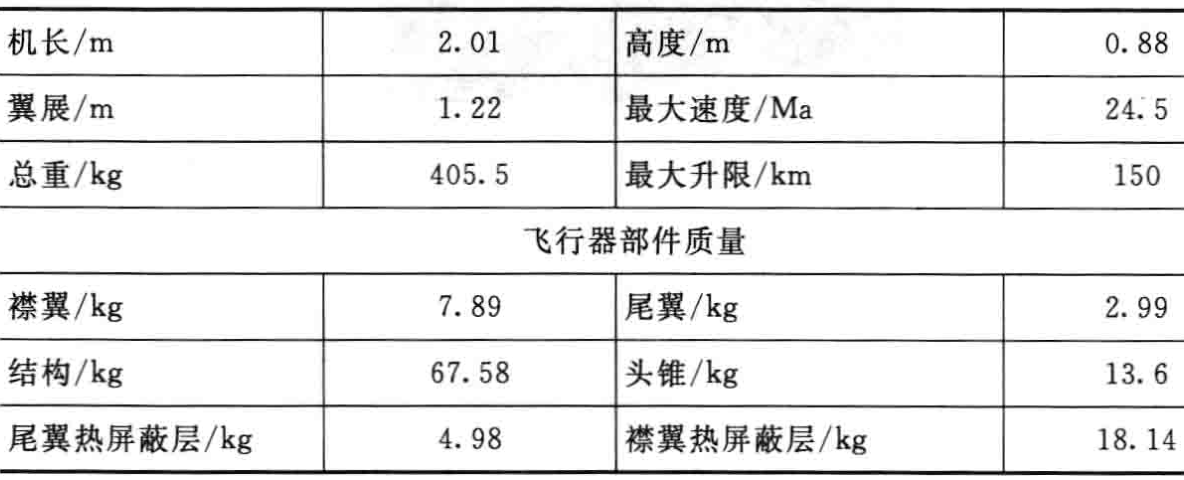
2.4X-23
X-23项目PRIME计划(也被称作SV-5D)是美国空军为获得机动再入飞行器数据和烧蚀保护层技术而在1964年启动的一种技术演示样机。

主要目的:
- 验证SV-5外形的气动特性;
- 在给定设计容差内验证热屏蔽层的吸热和散热性能;
- 验证制导和飞行控制系统的操作性能;
- 验证分系统的性能;
- 验证测试设备;
- 验证回收系统性能。
X-23A是一种滑翔飞行器,自身没有推进系统。
关键技术:
气动布局:外形基本为V形,带一个平底、弯曲的顶部和一对流线型垂尾;后部下表面有两个液压作动的襟翼;配有空间机动的氮气喷管系统。
结构设计:基本结构采用2014-T6钛合金材料,辅以铍、不锈钢和铝合金。
放热系统:机身和尾翼ESA-3560HF,机身前缘和其他尾翼部件ESA-5500,用于头锥和前襟的碳-酚醛烧蚀材料,垂尾蜂窝板上粘结钢蒙皮。
注:ESA-3560HF——H表示蜂窝结构,F表示二氧化硅-尼龙纤维,纤维在蜂窝中交织以固定碳化的烧蚀材料
冷却系统:内部电子部件产生的热量通过散热板毛细作用得到平衡。
控制系统:整个系统被称为组合式再入制导与姿态参照系统(CEGARS)。
遥测系统:遥测装置包括压力传感器、热电偶组件、温度热敏电阻和温度传感器。
评价:
X-23计划表明高超声速再入飞行器的设计取得了重大技术进步。它可能是第一架在再入期间具备机动能力的再入飞行器。在烧蚀材料和内部蒸气冷却方面进行了开拓性的试验。
2.5X-30
X-30是由美国国防部和美国国家航空航天局共同组织研制的一种双座高超声速研究机,同时也是由DARPA提出的NASP计划的原型机。
因研制难度太大且研制费用过高,X-30项目仅仅只是停留在缩比模型研究阶段,并在1994年11月被取消,因而没有建造任何全尺寸实体样机。
飞行器介绍:
X-30/NASP方案是一种吸气式氢燃料飞行器,以混合式超燃冲压发动机组件为动力。
气动布局:X-30采用尖头狭身机体大后掠三角翼单垂尾布局,以减少高速飞行时的阻力。
动力装置:由涡轮冲压/超声速燃烧冲压/入轨和再入大气火箭发动机构成。
注:火箭用来将飞机加速到起飞速度,而超燃冲压发动机则在巡航阶段提供动力。
材料:机体主要使用钛基复合材料,表面高热部分用带有内部冷却系统的防热材料敷设。
关键技术:
该技术促进了材料与结构、推进系统以及空气动力学与空气热力学三大关键技术领域的发展。
- **材料与结构:**要求材料与结构的质量轻(要求结构质量与起飞质量之比值达到0.15),并能够反复承受高温载荷。
五家公司各自展开新材料研究,提供材料的性能、制造工艺、连接技术和验收准则,说明材料可能应用的部位,并用材料制成结构部件,进行试验以证明其适用性。
-
**三种冷却方法:**热管冷却、对流冷却和发汗冷却。
-
**四种空天飞机的结构方案:**以翼身一体化为共同特点,提出基本方案,混合型方案,锥形方案,组合方案。
基本方案:基本方案采用机翼机身组合型,圆截面机身,发动机置于机身之下,其优点是低速控制性能和效能较高。
混合型方案:采用椭圆截面机身,发动机与机身下表面一体化,其优点是结构与防热质量较小,但低速控制性能和效能没有基本方案高。
锥型方案:采用圆锥形机身,发动机排成圆环状,装在机身外部,其优点是推力大、燃料容量大,但飞行稳定性、控制能力和气动效率不如基本方案好。
组合型方案:采用龟型机身,超声速燃烧冲压喷气发动机排列在机身下表面,此方案在效能上与基本方案相当,但结构与防热质量较大。
推进领域,机身一体化推进系统:
推进系统必须能在从地面起飞一直加速到入轨25Ma的极宽的范围内有效地工作。
通常要用一般的发动机(如涡轮喷气或涡轮风扇发动机)将空天飞机速度从零加速到2Ma,
接着用亚声速燃烧的冲压喷气发动机再加速到 5M,
再用超声速燃烧冲压喷气发动机进一步加速到所能达到的最大速度,
最后靠火箭发动机加速到25Ma入轨。
2.6 X-33
X-33/RLV技术计划的目标是开发关键技术,以使工业部门能研制一种象飞机式操作的以火箭发动机为动力的SSTO。
RLV技术计划主要由X-33先进技术验证机、X-34小型重复使用运载器、改进型DC-XA火箭和RLV关键技术等计划组成,其中以X-33计划为核心。
飞行器介绍:
关键技术:
RLV的通用关键性技术包括可重复使用的复合材料低温贮箱、复合材料主结构、耐久性防热系统和先进推进技术等。
复合材料液氢贮箱采用了一种自动纤维铺设(AFP)技术。
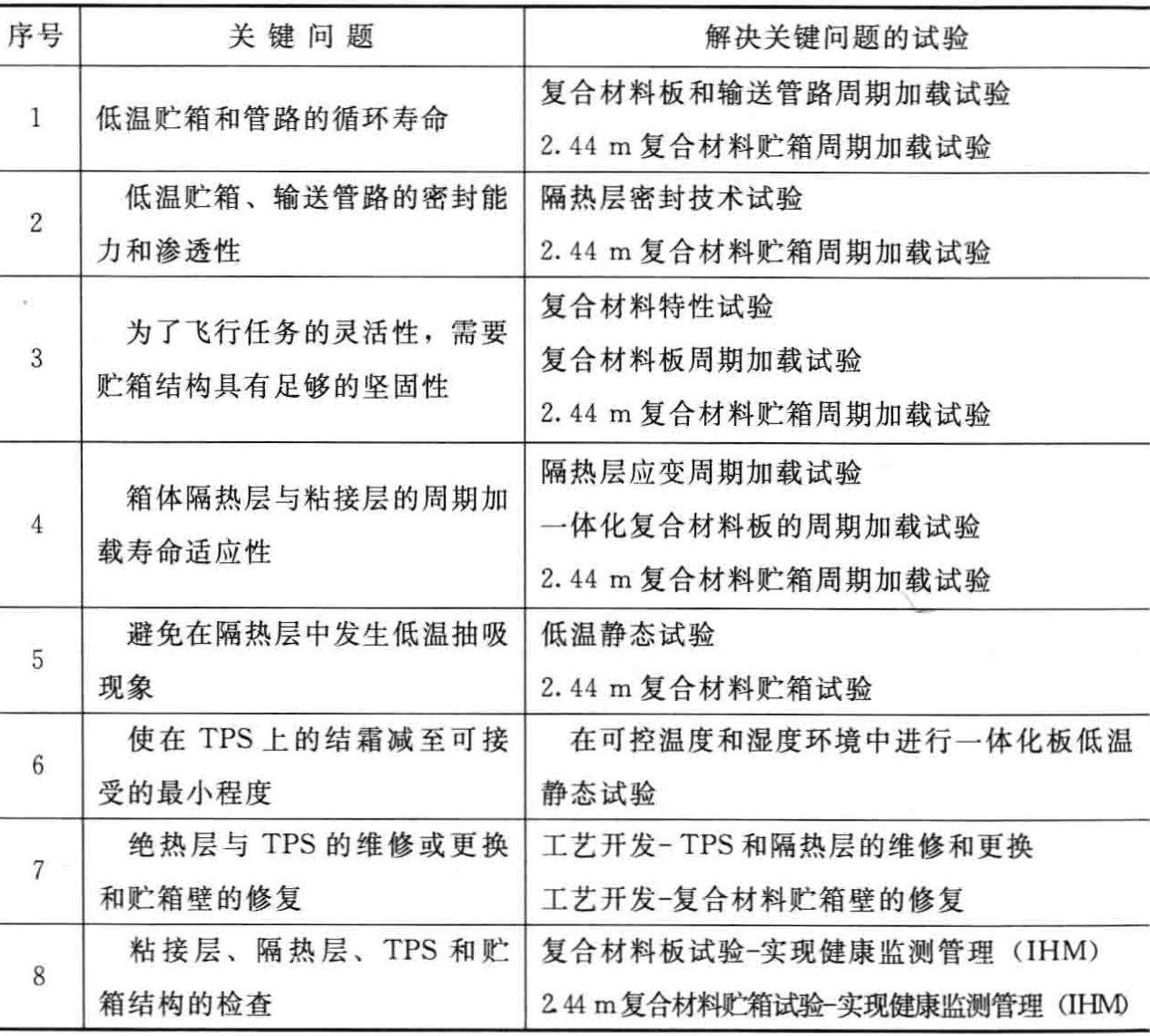
复合材料主结构也是采用“积木式”方法,从分析着手经过试样与部件试验到全尺寸部件试验。

RLV采用的防热系统必须轻质、耐用,最少能承受100次飞行任务,维护与检查要求要比现有的航天飞机降低一个数量级。
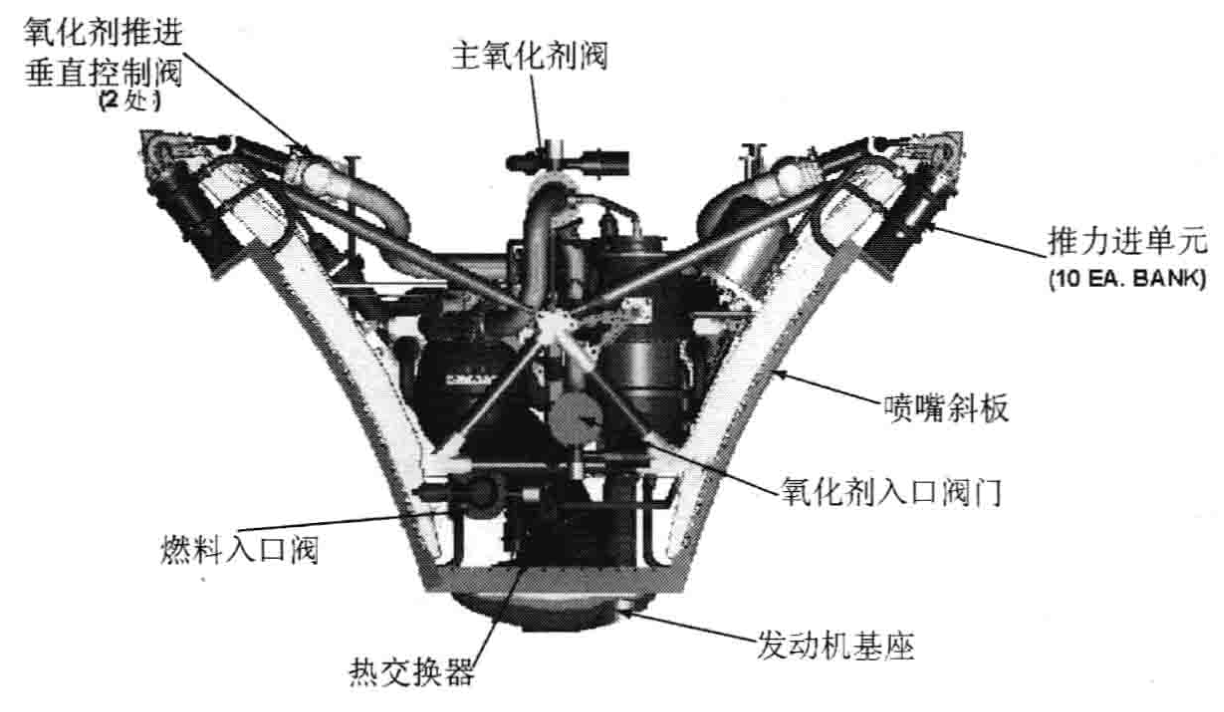
先进推进技术计划的目标是要研制和论证主发动机的性能和工作特点,包括研究推重比、坚固耐用性、可操作性、可检测性和经济承受力等。选择了直排气塞式发动机作为X-33/RLV的动力系统。
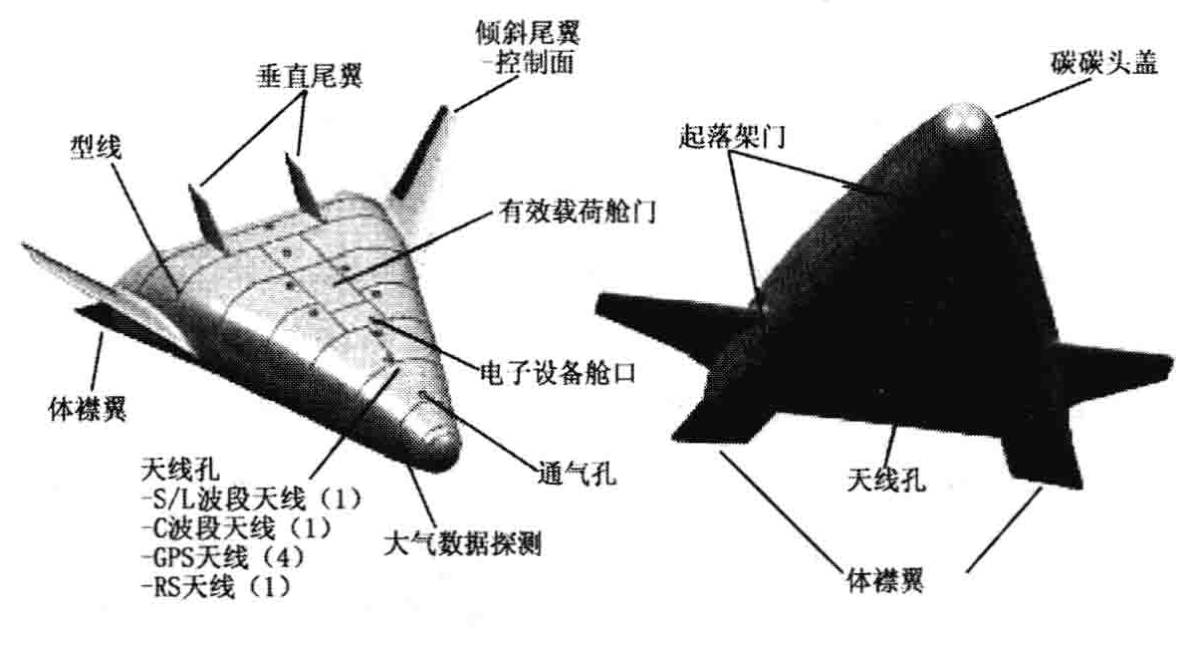
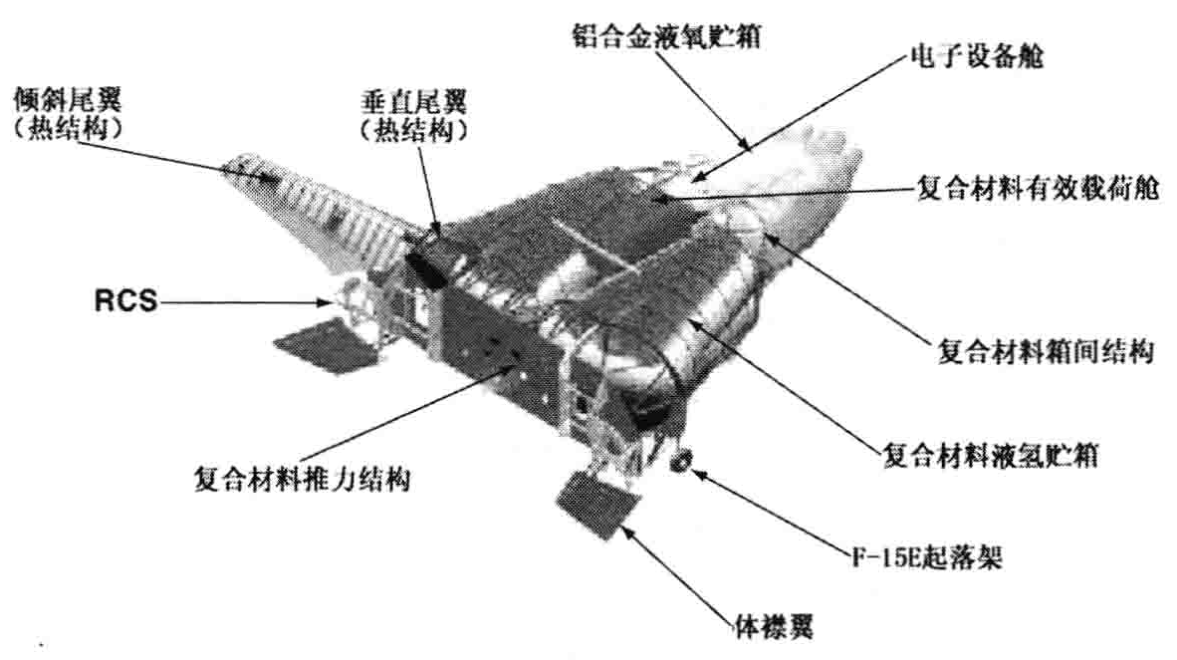
2.7X-37B
X-37B飞行器计划主要用于空间技术试验与验证,将演示验证可重复使用空间飞行器的20多项重大技术,如防热系统、推进系统、电子系统、自主导航与控制、自主返回与着陆和起落架技术等。
项目目标:
对可重复使用的空间飞行器技术进行空间验证、降低风险、运行方案研发。
飞行器介绍:
X-37B具有自动离轨能力,使用小型太阳能电池帆板,可在轨提供电力,具有长期驻留并具有机动变轨能力。
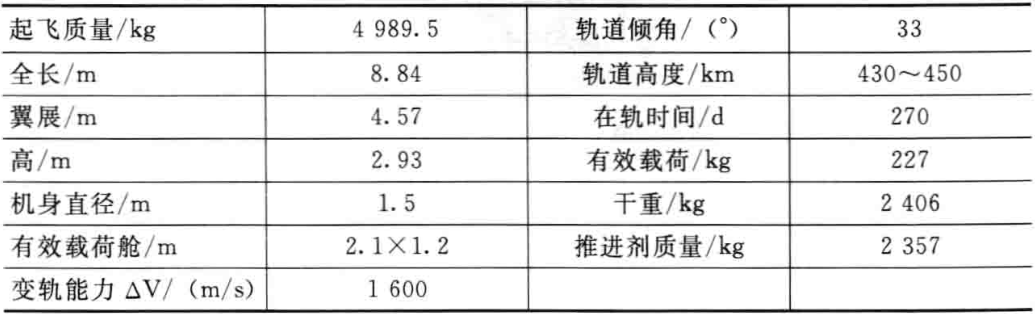

X-37B(垂直尾翼)采用与航天飞机轨道器(倾斜尾翼)相似的带翼体设计方案。
前缘采用新一代耐高温材料(强化单体纤维抗氧化陶瓷瓦)。
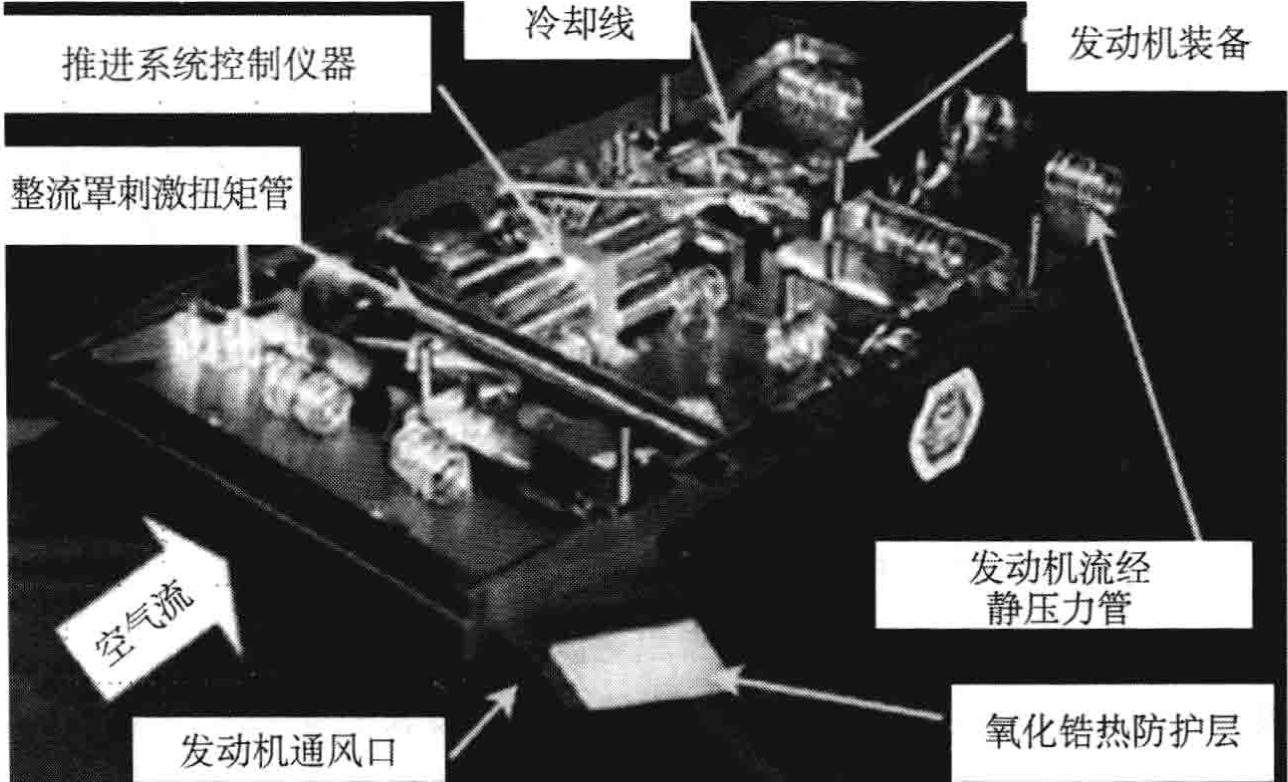
过氧化氢/煤油推进系统。
关键技术:
X-37B采用了强化单体纤维抗氧化陶瓷瓦(前缘),强化单体纤维隔热瓦、先进的共形可重复使用防热毡等新型防热材料。
采用了与航天飞机相似的升力体设计,升阻比与航天飞机相近。
X-37B尾部携带的火箭发动机,使用推进剂.
X-37B没有液压系统,飞行控制与制动依靠机电作动器实现控制。
2.8X-43
该计划主要研究并演示可用于高超声速飞机与可重复使用的天地往返系统的超燃冲压发动机技术与一体化设计技术。
共有4个型号试飞器,每个型号分别演示验证不同的关键技术。

飞行器介绍:
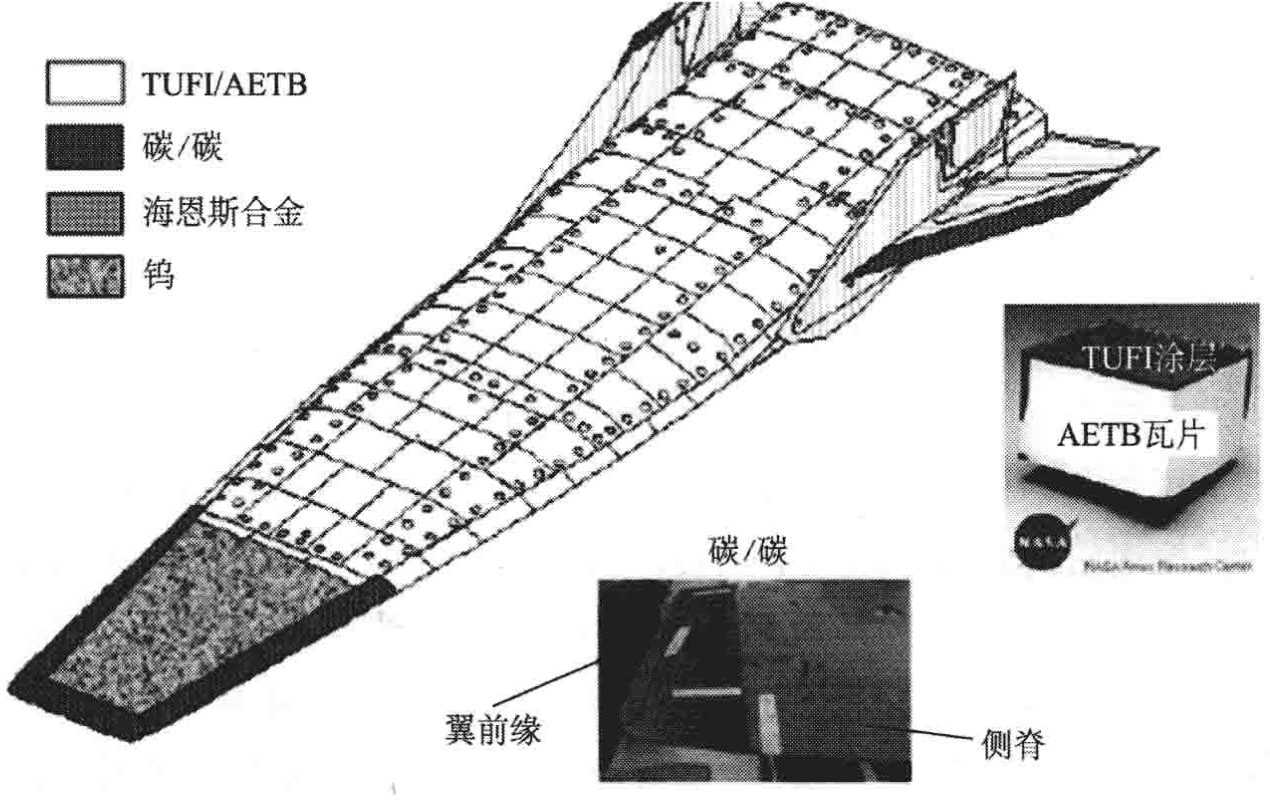
X-43A采用液氢燃料,头部采用钨、机翼前缘与垂直安定面采用碳/碳复合材料,机翼采用哈式钴/铬/镍合金制成。
X-43B将是第一个完全可重复使用的高超声速试飞器,允许进行更多的飞行以探索飞行包线,验证飞向太空的组合循环发动机的性能和耐用能力。
X-43C采用试验涡轮发动机和碳氢燃料超燃冲压发动机的组合动力装置。实验目的:验证系新型发动机在稳定和机动飞行时的飞行性能,吸气式高超声速飞行器在有\无动力时的飞行特性。
X-43D采用液氢燃料双模态超燃冲压发动机,能提供10s的动力并将试飞器加速到15Ma。
关键技术:
推进系统:
采用气态氢燃料和硅烷点火剂,发动机采用矩形流道、机身一体化设计,可动式进气道盖板,氮气吹除系统。
热防护系统与材料:
飞行器的机身桁梁和隔板由钢、钛、铝等材料制成,其上覆盖有钢、铝蒙皮(出于结构刚度需要),而尾舱选用钛金属(出于热防护需求)。
X-43A机体的热防护采用碳-碳前缘,上、下表面覆盖强化氧化铝防热(AETB)瓷瓦。
发动机的热防护采用散热库珀合金(Glidcop),在其整流罩和侧壁前缘则采用了主动式水冷系统
气动外形设计:
传统升力体结构设计,尖前缘、薄控制面(适应高速巡航);机体上表面缓和的曲率、前端压舱段(重心靠前、良好的纵向稳定性);前缘小曲率半径(最小的气动阻力)
导航、制导与控制(GNC)技术:
X-43A试飞器集成了管理与控制系统,该系统由一套飞行管理单元(FMU)、机电传动机构和控制器(控制4个舵面的舵机和发动机整流罩的传动机构)以及测量系统组成。
助推器与试验飞行器的连接与分离系统:
完成在7Ma和10Ma的飞行条件下成功地进行过分离。需要避免不稳定再接触;分离持续时间最少;接触截面刚度在最大化;简化机械结构。
提出了爆炸螺栓、弹射活塞(执行分离操作)和各种仪表(记录分离过程并捕获异常现象)等的解决方案。
评价:
截至目前,X-43A共进行了三次飞行试验,前两次飞行试验以7Ma的速度进行,第三次将以 l0Ma速度进行。
试验成功展示了美国在该领域的重大进展:
- 是以超燃冲压发动机为动力的一体化飞行器可以获得正推力,以10Ma的速度飞行;
- 是两个非对称的飞行器可以在高超声速的高动压下成功分离,实现自由飞行。
2.9X-51A
HyTech计划的目标是发展碳氢燃料-主动冷却超燃冲压发动机技术,验证在4~8Ma范围内发动机的可操作性、性能和结构的耐久性。
HyTech计划的主要部分是可贮存燃料超燃冲压发动机气流路径概念(SFSFC)计划。
计划的发展历程:
- 性能试验发动机(PTE)
高度关注使用可贮存液态碳氢燃料的超燃冲压发动机。
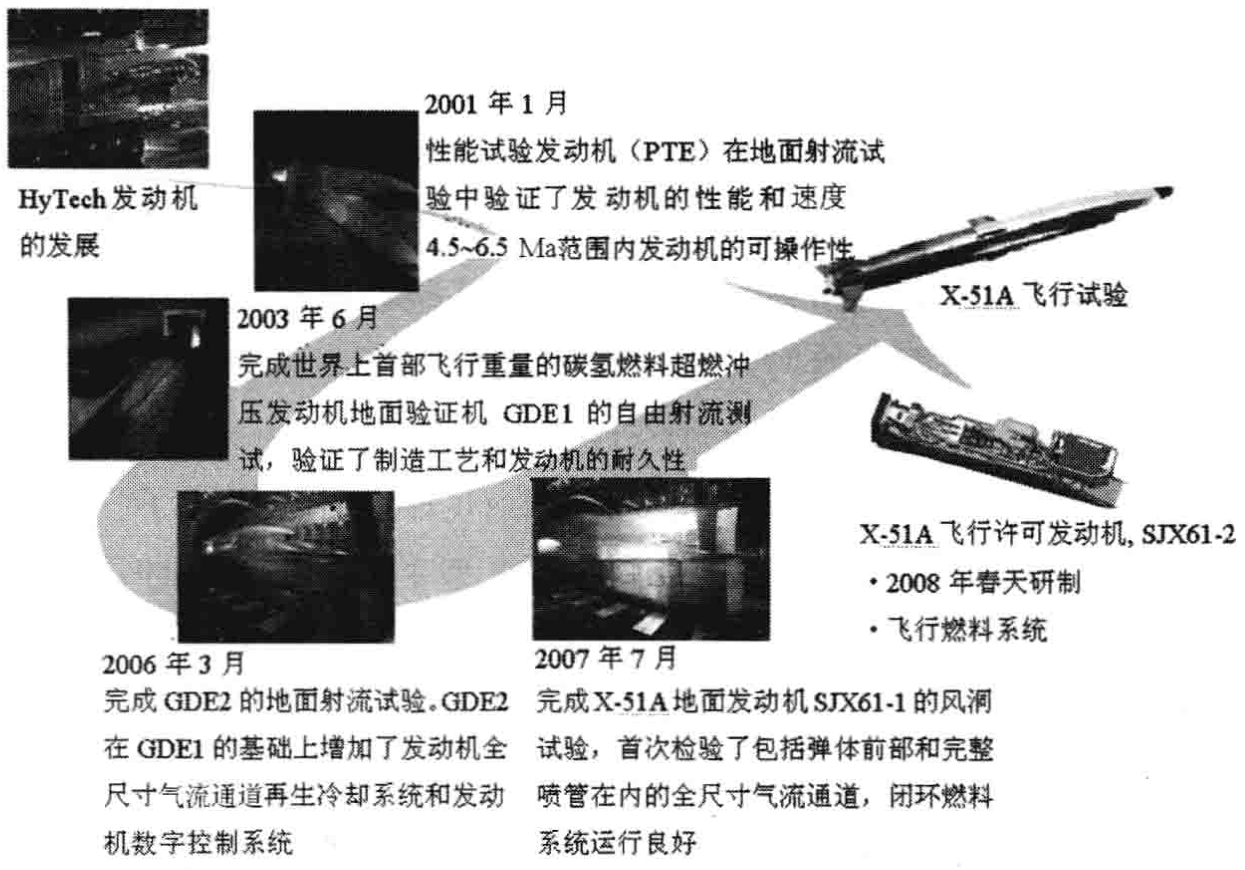
- GDE-1发动机
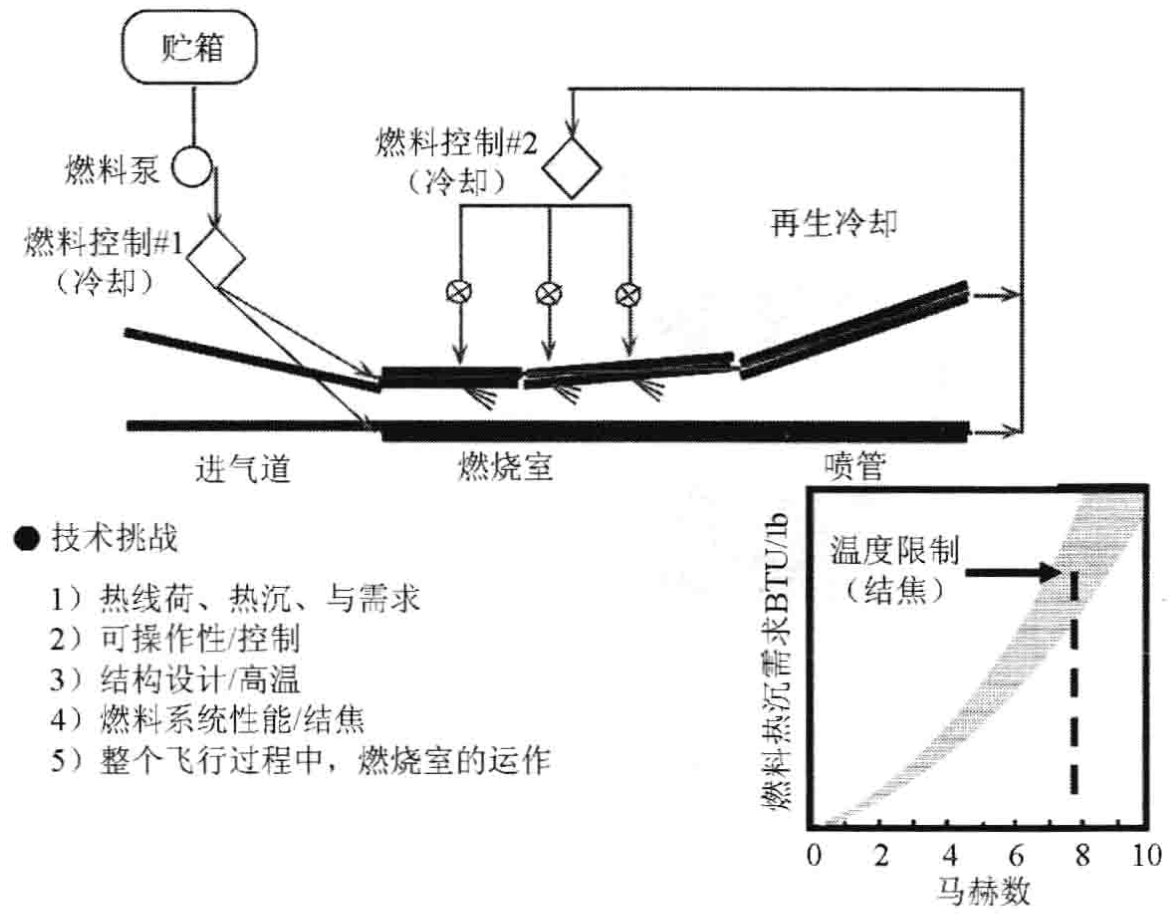
开始发展具备燃料主动冷却特点的飞行质量发动机。发动机以一种开环的方式运行,燃料流出贮箱后通过分配面板分成两部分,分别执行发动机冷却和燃烧任务。试验验证了燃料冷却结构的热响应和结构的耐久性。
- GDE-2发动机
它是飞行质量、采用闭环燃料系统的发动机,发动机的冷却和燃料的蒸发、裂解是结合在一起的。
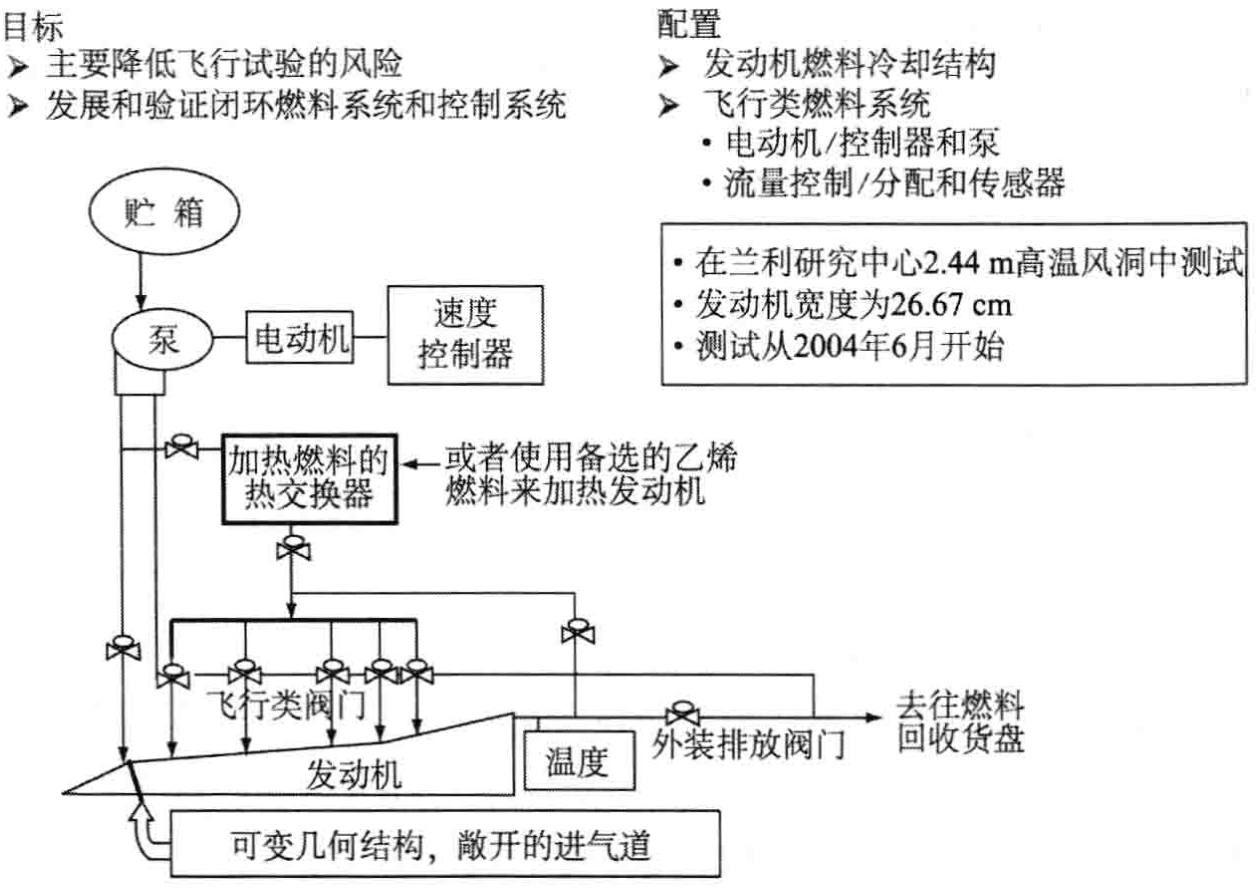
可变的进气道结构是发动机的另一显著特点。可调进气道整流罩鱼鳞板可以优化飞行全过程的进气道捕获气流和气动力收缩比,提供最大的进气效率。

- SJX61发动机
为X-51A计划设计的 SJX61发动机是HyTech计划中最主要的成果。
SJX61-1闭环燃料系统运行良好,计算出来的发动机性能和可操作性也得到了检验,甚至超过了预先的设想v。
计划目的:
该计划由2部分组成,即超燃冲压发动机和乘波体飞行器。
- 计划的首要目标对美国空军HyTech计划的吸热型碳氢燃料超燃冲压发动机进行飞行试验。
- 计划的次要目标是收集主动冷却、自控运行的超燃冲压发动机地面和飞行数据,进一步调整超燃冲压发动机计算机设计工具;
- 验证吸热型燃料超燃冲压发动机在飞行中的可行性和推进自由飞行飞行器的可行性。
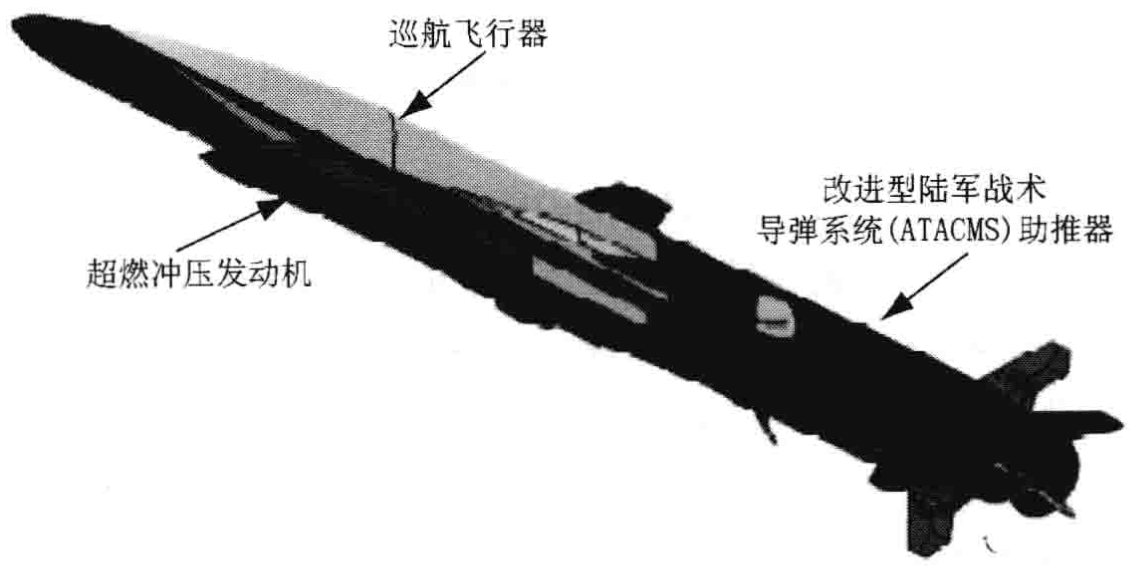
飞行器介绍:
X-51A试飞器长7.62m,起飞质量1780kg,最大宽度 584.2mm.巡航飞行器长4.27m,质量671kg。
巡航速度6~7Ma,发射高度10700m,发射速度4.5Ma。
动力系统为1台超燃冲压发动机和一台固体火箭助推器,燃料为JP-7碳氢燃料。
关键技术:
- 超燃冲压发动机
基于碳氢燃料超燃冲压发动机技术(HySET)项目和HyTech计划中的性能试验发动机(PTE)、地面演示验证发动机(GDE-1, GDE-2)的技术基础制造了2台用于X-51A试飞器的动力装置一X-1,X-2。
- 气动外形设计
X-51A飞行器采用乘波体设计,方柱形机身、楔形头部和无收缩的尾部,尾端串联一个固体火箭助推器,助推器尾部有稳定翼。
- 结构与材料
X-51A导弹主体部分是金属材料,表面覆盖有轻型热防护系统泡沫和瓷瓦。
机体部分的框架板壁等由铝制成,前鼻端内部是金属钨,外部表面覆盖二氧化硅防护层。
巡航飞行器与机体的过渡部分采用铬镍铁合金的适配器。
巡航飞行器与级间部分的蒙皮,包括助推器上的四个可动的尾翼均采用铝材料。
助推器上另外还有水平铝尾翼用于保持助推段的稳定。
超燃冲压发动机的舱壁由铬镍铁合金板制造,采用燃料冷却。
巡航飞行器的四个可动小翼也采用镍合金,前缘则为碳/碳复合材料。级间部分的流通结构和助推器
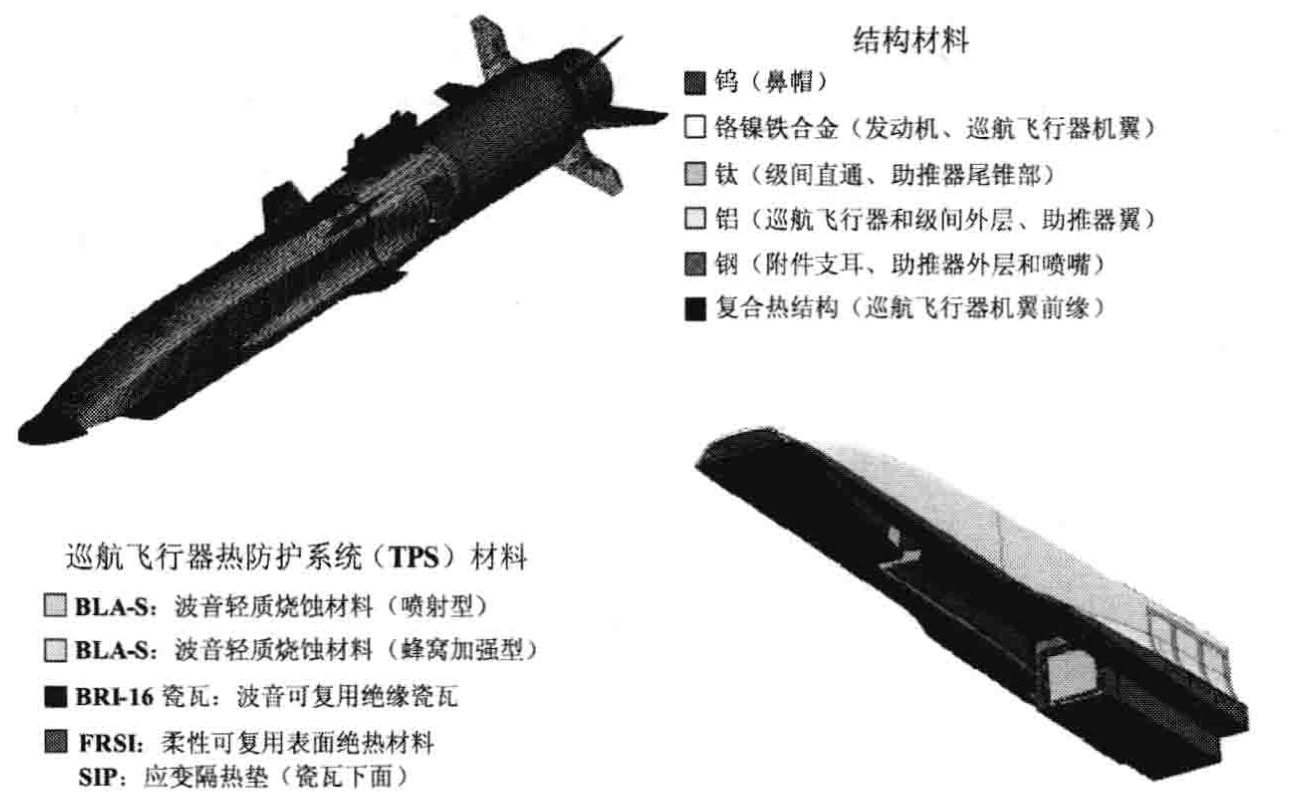
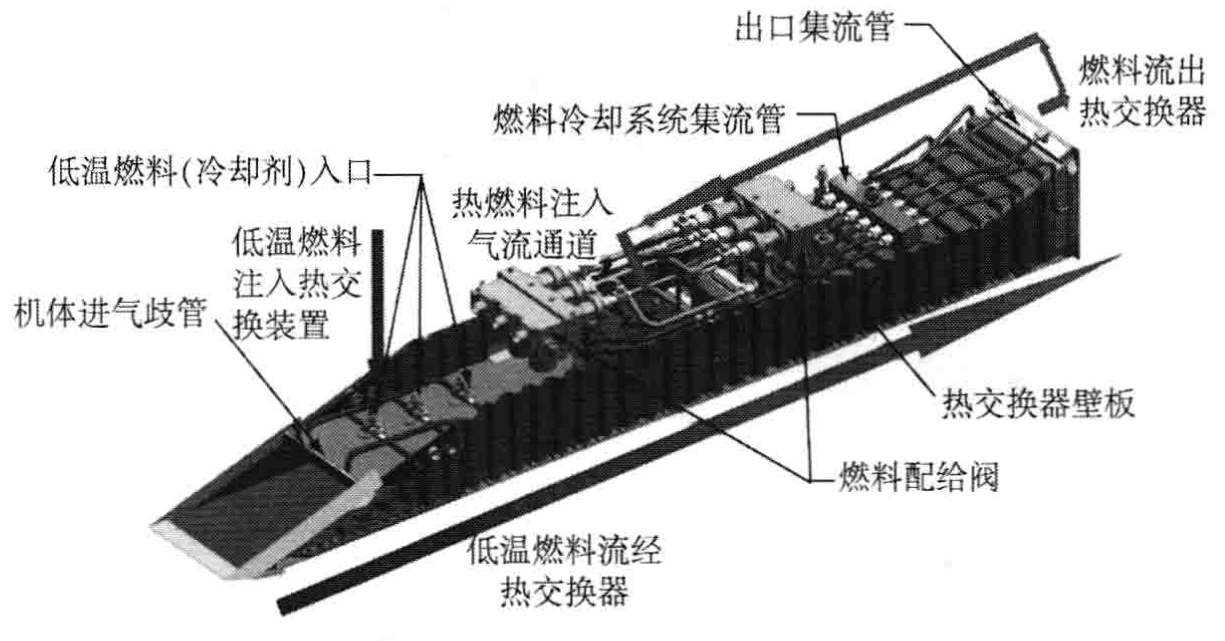
- 热防护系统
X-51A试飞器的热防护主要采用瓷瓦和泡沫材料。
发动机舱内部装有柔性可重复使用隔热材料(FRSI),以阻止发动机对机体的热辐射。
飞行器喷嘴的内部使用一种蜂巢加强型泡沫材料一BLA-HD。
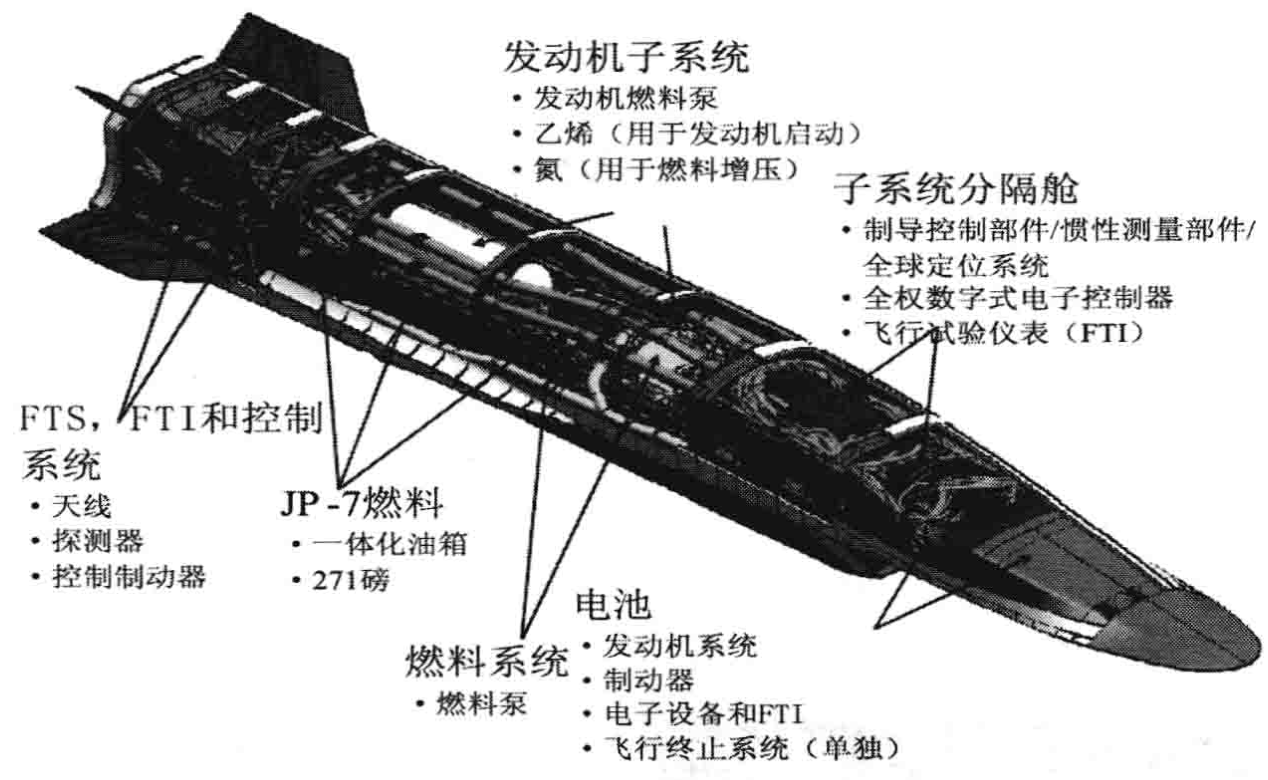
- 试飞器子系统的设计与配置
X-51A试飞器可用空间较小,各子系统都紧密地排列在铝制蒙皮之下。X-51A采用了整体式湿舱设计方法,燃料贮存在蒙皮与隔离壁围成的燃料箱内。
评价:
在飞行中验证X-51A用吸热型燃料的超燃冲压发动机的生存能力,同时也验证以超燃冲压发动机为动力的、自主飞行的飞行器的生存能力。
X-51A迈出的这一步继续保持了美国在高超声速研究领域的技术优势。
2.10快速反应导弹演示器计划
1996年国防预先研究计划局为了集中力量发展高超声速推进技术,制定了快速反应导弹演示器计划(ARRMD)。
计划目的:
研制一种采用碳氢燃料超燃冲压发动机的6~8Ma的高超声速导弹武器,最大射程800 ~ 1200Km,攻击时间敏感目标(如战区弹道导弹发射架和航空母舰)。
方案:
空军的方案是以yTech计划中开发的推进技术为基础,导弹为扁平的乘波体外形,使用双模态超燃冲压发动机,发动机为矩形,装在飞行器下侧。
海军的方案是采用不冷却、轴对称双燃烧室亚燃/超燃冲压发动机推进的圆柱体形导弹。

波音公司进行验证,并最终肯定了美国空军的乘波体构型双模态超燃冲压发动机设计。
结果:
ARRMD计划最终在2001年被迫终止,空军与海军遂又分开独立开展各自的高超声速导弹计划。
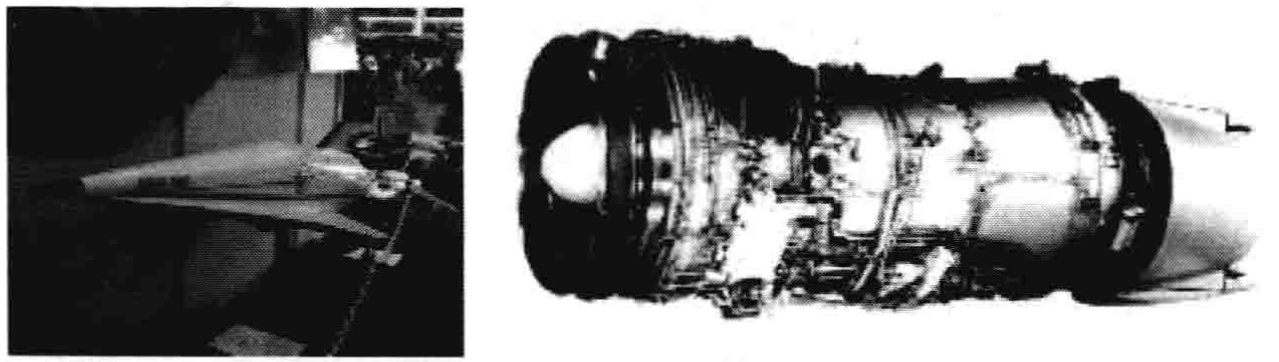
2.11 HyFly
2002年2月,美国高级研究计划局和海军研究办公室(ONR)联合发起HyFly计划,用于设计、试验和生产巡航速度6Ma、射程超过1110km、能布撒子弹药或其他战斗部的高超声速巡航导弹,以应对时间敏感机动目标。
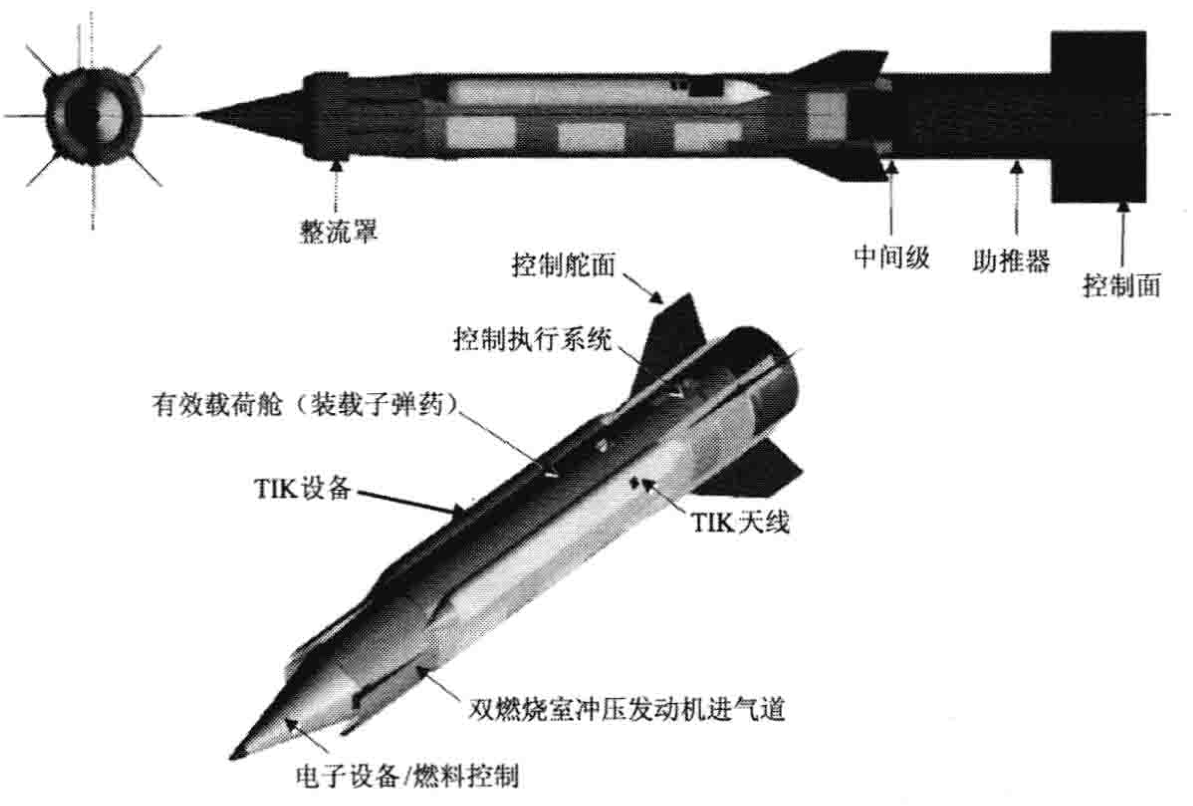
飞行器介绍:
HyFly导弹的外形酷似一枚大型反舰导弹,钛合金弹体,为承受高温,外部喷涂了特殊材料。
发动机采用轻型耐高温复合材料制成(可能是陶瓷基复合材料)。
未来发展的导弹武器还计划安装通信数据链,可以在发射后的飞行过程中实现重新瞄准。
关键技术:
- 双燃烧室冲压发动机:
用于飞行试验的发动机为亚声速燃烧室和超声速燃烧室串联一体化的超燃冲压发动机,其工作机理是先借助亚声速燃烧室进行预先燃烧,再利用超声速燃烧室实现完全燃烧,获得所需的推力。
它结合了冲压发动机和超高速冲压发动机的优点。
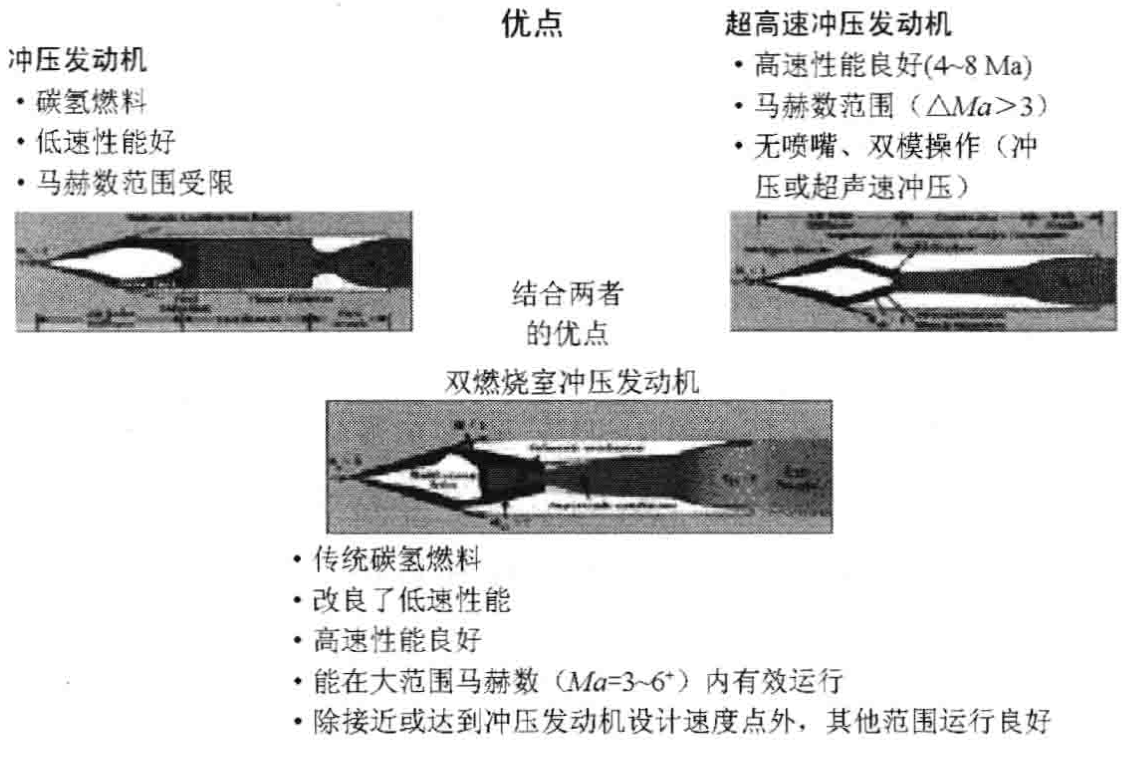
DCR发动机能实现稳定的超声速燃烧,可以获得 6Ma高超声速性能。
- 气动外形设计:
HyFly导弹作为一种常规的武器系统,由常规主战平台携带实施快速打击。
HyFly导弹为轴对称、维头圆柱体导弹构型,DCR发动机安装在锥头与圆柱体交接处的侧壁,采用“嵌入式”方式将助推固体火箭发动机安装在导弹的弹体内,弹体尾部是可动尾翼以提供稳定性和可控性。
材料:
HyFly导弹弹体采用钛合金制造,外部喷涂了特殊材料,以承受高速飞行所产生的高温。
发动机则采用航空发动机公司研发的轻质、耐高温陶瓷基复合材料制造。
评价:
2005年,试飞器速度最终达到5.5Ma,这是世界上碳氢燃料吸气式超燃冲压发动机的首次高超声速自由飞行。
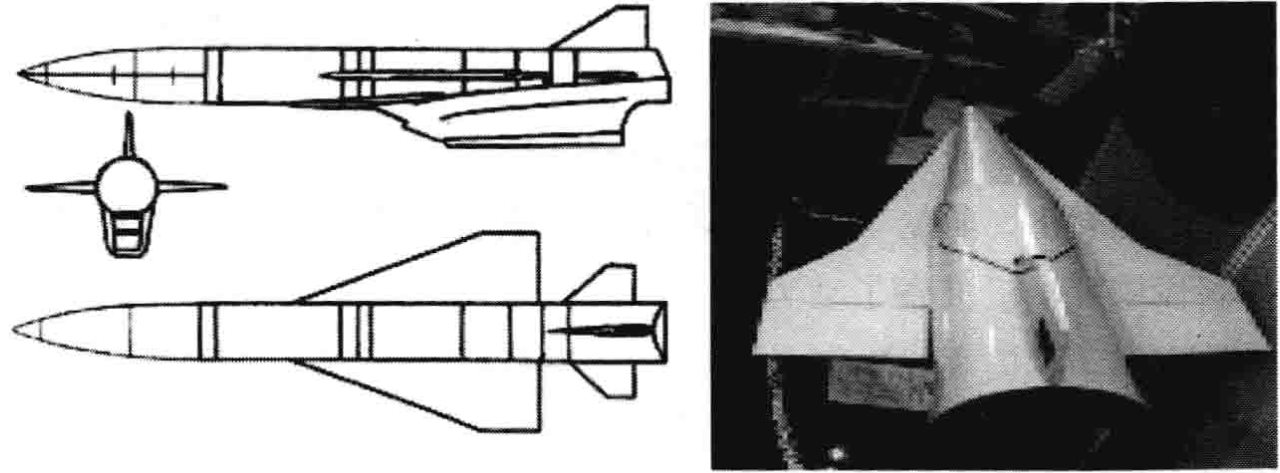
2.12时敏远程打击创新方法
2003年5月,海军研究办公室在美国空军和美国国家航空航天局的大力支持下,提出了时敏远程打击创新方法(RATTLRS)技术演示计划。
计划目的:
旨在发展一种用先进的涡轮发动机作动力、可以4Ma的巡航速度持续飞行达15min以上的新型超声速巡航导弹方案。
飞行器介绍:
计划研发的三种导弹型号:质量和尺寸最小的空射型;水面舰和潜艇发射型(4Ma);通用型。
从外观来看,RATTLRS验证机就如同一只放大的梭镖,为了减小超声速飞行时的激波阻力,截尖的大后掠三角翼带有明显的尖削前缘,并一直延伸到机体前部,形成锐利的边条翼。
关键技术:
RATTLRS验证机采用尖锐修长的整流锥。前后可移动的整流锥采用了内、外压混合式压缩,具有良好的超声速性能,用于降低高马赫数下的激波损失和改变进口几何面积。
RATTLRS验证机的关键技术更多地体现于YJ102R发动机上。
YJ102R发动机采用了多孔高温合金制造的一种层状合金,可以吹入来自压气机的高压空气,为燃烧室和涡轮部件提供蒸发式冷却。
各种试验情况:
侵彻能力:轻型钻地战斗部在速度增大一倍的条件下,达到了等同于重型钻地弹的侵彻深度
布撒试验:高速飞抵目标区域上空后可以相应减小飞行速度,实现在亚声速或超声速下投放子弹药。
2.13 HTV-2
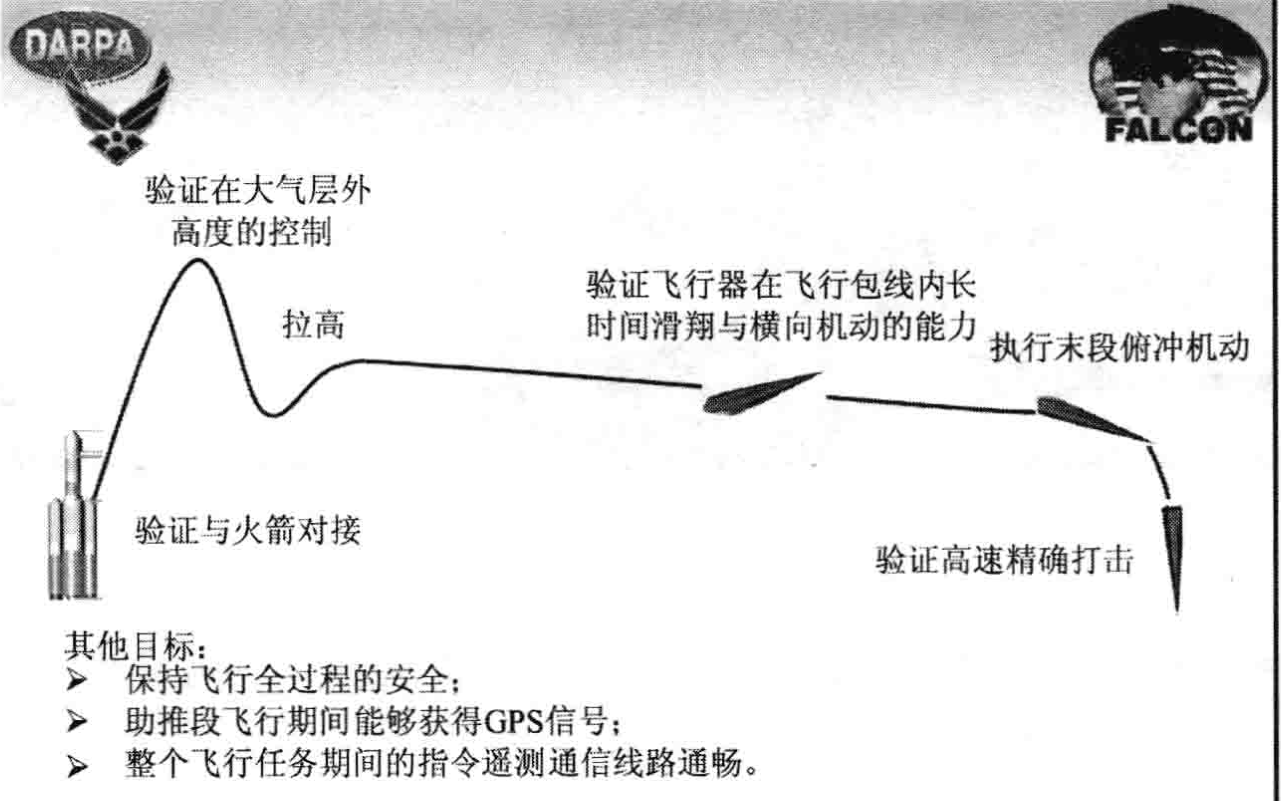
2003年7月29日,美国空军和国防部预先研究计划局(DAR PA)联合开展FALCON计划。
计划目标:
研发、飞行试验和验证高超声速飞行器的关键技术,确保美国在近期和远期具备执行全球快速精确打击的能力;演示验证低成本、快速航天发射的能力。
具体任务是发展小型运载火箭(SLV)和高超声速武器系统(HWS)
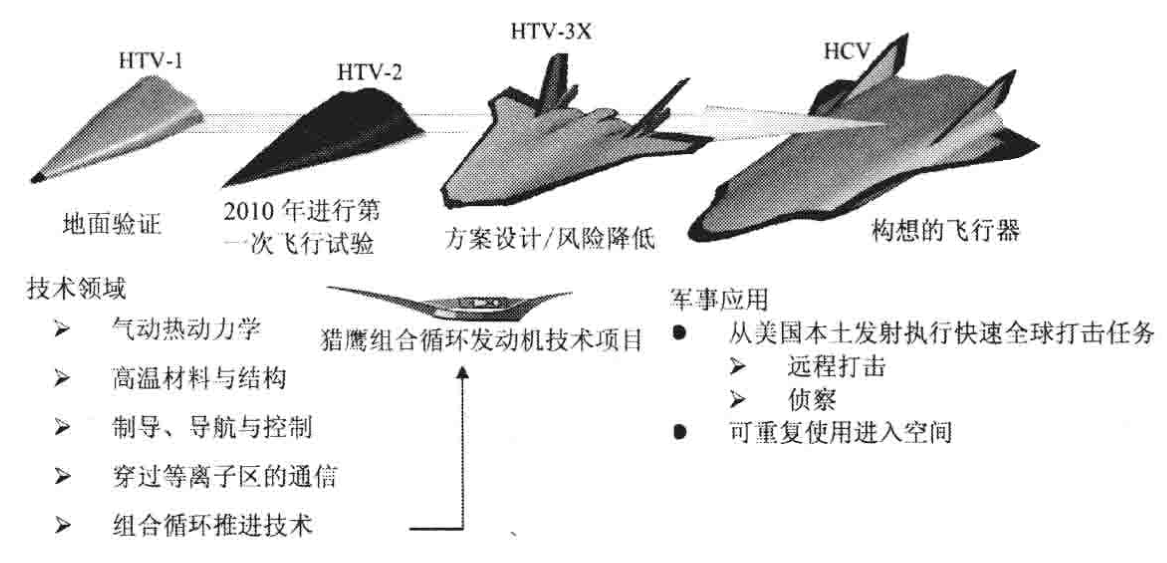
HTV-3X是一种可从传统跑道上起飞、以6Ma的速度巡航、返回并在跑道上着陆的试验机,采用涡轮基组合循环发动机(TBCC)作为推进系统。
飞行器介绍:
- HTV-1

HTV-1的制造难题在于其壳体大部分是曲面构型,特别是前缘更是高曲率曲面。由于无法克服技术难题尽管HTV-1的研制被迫中止,但它仍为后续的HTV-2飞行器的研制奠定了一定的技术基础。
- HTV-2
HTV-2采用前缘更尖薄的低曲率多片式壳体,相对HTV-1容易制造。
主要用于验证高超声速滑翔机动飞行器的气动布局技术、气动热防护设计、材料和制造工艺技术、自主制导与控制和飞行试验规划技术等,为美国发展常规快速全球打击能力做技术储备。
HTV-2面临的关键技术挑战主要包括:新型高升阻比气动外形,先进的轻质、坚固的热防护结构,材料与制造技术,高超声速自主导航、制导与控制系统,自主飞行安全系统。
关键技术:
- 气动布局
CAV-H设计方案采用活动的偏航襟翼,以便更好地控制其复杂的气动外形,其中重心控制对保持气动稳定性非常关键。
CAV-H为乘波体外形,提供了更大的可用面积,两片襟翼可以完成更为复杂的飞行任务。

- 弹道设计
作为助推-滑翔飞行器,HTV-2将实现大范围的横向机动与长时间在稠密大气层内的飞行。
- 热防护材料
包括:使用温度低于1649℃的翼前缘材料;使用温度低于1982℃的难熔复合材料;高温多层隔热材料(HTMLI);大面积热防护系统一承载式气动外壳以及研制高温密封材料。
使用温度低于1649℃的翼前缘材料:改进目前材料,使其具备执行多次任务的能力(超过50次)。
使用温度低于1982℃的难熔复合材料:改进目前材料,使其具备执行多次任务的能力(超过10次)。
高温多层隔热材料(HTMLI):改进现有的隔热系统,主要是难熔材料和低热辐射系数薄膜。
大面积热防护系统一承载式气动外壳:要求能够在几英寸的距离内承受上千度的热梯度分布;有足够的隔热能力,;系统还要有足够的结构适应性,能够调节、适应结构热膨胀差异。
研制高温密封材料:研制用于工作温度接近1649℃的控制面的可重复使用动态密封件。
- 制导与控制技术
基于现有的INS/GPS系统进行设计,利用主动偏航控制系统、二级惯性测量装置和GPS辅助导航系统使再入飞行器实现精确制导。
试验:
地面风洞试验(验证新CFD解法与试验结果的相关性以及确定飞行器表面的”热划伤“);
电弧加热试验(验证前缘耐久度);
气动热可视化技术试验(精确预测边界层的”转捩“现象)。
飞行试验,评估热防护系统,气动外形,机动性和高声速巡航与载入到远距离通讯能力。
评价:
针对试验数据的初步分析展示了很多积极的成果。
HTV-2飞行器作为高超声速技术验证机的重要组成部分,推动了高超声速气动力学、材料、自主制导与控制和飞行试验规划的技术发展水平。
2.14弧光计划
2010年7月7日,美国防高级研究计划局发布弧光(AR CLIGHT)计划第一阶段项目征询书,标志着弧光项目的研制工作正式启动。
项目目的:
旨在演示验证无动力高超声速滑翔技术,设计、制造能够对远程、时间敏感目标进行快速打击的助推滑翔式高超声速战术导弹,并进行相关飞行试验。
飞行器介绍:
- 射程达到 3700km(2000 n mile),飞行时间30min左右;
- 有效载荷 45.4 ~ 90.8kg(100 ~ 200磅);
- 能与舰载的标准Mk41垂直发射系统兼容;
- 可有效突破敌方防空火力,具有较强的生存能力
弧光飞行器研制:
- 第一阶段概念设计,概念设计评审和演示飞行器设计;
- 第二阶段,完善设计,进行必要的试验并完成初始设计评审;
- 第三阶段,多方进一步完善概念设计并制造出主推滑翔式飞行器,进行相关飞行演示试验。
关键技术:
-
弧光飞行器研制
-
弹翼材料研发
作为助推滑翔式导弹的一项关键使能技术,其研制将与飞行器研制工作分开但同步实施,目标是研制一种能为弧光演示飞行器提供高升阻比和高可控性的弹翼材料。
2.15美国高超声速技术未来发展目标
近期,发展高超声速巡航导弹与不大于6Ma的吸气式高超声速飞机;中期发展全球打击能力的助推滑翔武器技术;远期发展完全重复使用的高超声速空天飞行器。
美国国防部高超声速计划发展路线图发展目标:
-
打击/持久作战运用发展路线:
- 2018年突破具备时间敏感的区域性打击能力的高速/高超声速巡航远程武器技术,实现能够在任务下达10 ~ 20min内,飞行1111.2 ~ 1852km(600 ~ 1000 n mile),精确打击高价值的、时间敏感、固定/可再定位、移动和深埋目标;
- 2015一2020年突破具备时间敏感的全球打击能力的助推滑翔武器技术,能够全球到达、在任务下达1h内精确打击高价值的、时间敏感、固定/可再定位、移动和深埋目标;
- 2020年后突破具备全球兵力投送能力的完全重复使用的高超声速空天平台技术,实现全球到达、多次出击用于持续的兵力投送和部署。
-
空间进入响应运用发展路线:
- 在近期,采用火箭推进、按要求发射、重复使用火箭和一次性使用上面级,以垂直发射水平着陆的方式混合进入空间
- 在远期,突破重复使用的超燃冲压发动机完全重复使用系统技术,以水平起降方式进入空间。
美国空军技术远景2010一2030的发展目标:
空军未来5大核心能力:核威慑作战、空中优势、太空优势、全球精确打击、全球一体化的情报、监视及侦察。
三大领域高超声速技术:快速战场ISR打击系统、高速突防巡航导弹与重复使用太空运载器。
-
快速战场ISR/打击系统:
- 用于支持全球精确打击和全球一体化情报、监视及侦察两大核心能力。
- 是一种不大于6Ma的吸气式高超声速系统,这种高超声速飞行器既能够避免极高温问题,同时还能针对远处高价值时间敏感目标提供快速情报、监视、侦察与打击能力。
- 近期发展类似于采用TBCC组合循环发动机推进的HTV-3
- 远期发展RBCC组合循环发动机推进的空天飞机。
-
高速突防巡航导弹:
- 用于支持核威慑作战、空中优势和全球精确打击三大核心能力。
- 是一种高效防区外打击武器,凭借速度优势完成突防和生存,
- 在过去10年发展了双模亚燃/超燃冲压发动机推进、类似于X-51A的技术验证飞行器。
-
重复使用太空运载器:
- 用于支持太空优势和全球一体化的情报、监视及侦察两大核心内容
- 描述了采用重复使用火箭作为第一级,重复使用火箭基组合循环超燃冲压发动机作为第二级的空天飞行器
2.16小结
美国高超之路漫长而曲折,长期支撑其的是:1.举国上下一如既往坚持不懈的追求精神和探索精神;2.始终奉行从未改变的军事装备领先对手的发展方针。
在开展的60余项高超声速技术探索实验中,大部分因内、外因素而中途夭折,但这些计划并未被深埋在历史的尘土下,相反地,他们化成了高超声速飞行器研究的沃土。因他们而得以验证的高超声速理论,得以设计和试验的气动外形结构(X-15),得以研究和创造的新材料、新工艺(X-30),得以开展和建造的基础设施(X-20),均为其日后高超声速技术的突破奠定了深厚的基础。
美国高超声速技术遭受的挫折,一方面体现了高超声速技术巨大的困难,另一面也反映了决策者与管理者计划方向指定的重要性。
根据对需求和技术可行性的分析,制定通过近期、中期和远期应用目标分步实施从无人到有人、从一次使用到重复使用的发展战略。
第3章 俄罗斯临近空间高超声速飞行器发展现状
俄罗斯的高超声速技术同美国比肩,目前也处于世界领先地位,它是在苏联原有的冲压发动机技术基础上发展起来的。
3.1冷计划
20世纪 70年代末,俄罗斯巴拉诺夫中央发动机研究院与俄罗斯茹科夫斯基中央空气流体动力研究院等单位合作开展了冷计划。
计划目的:
通过飞行试验验证双模态超燃冲压发动机技术,并获得相关技术数据。
飞行器介绍:
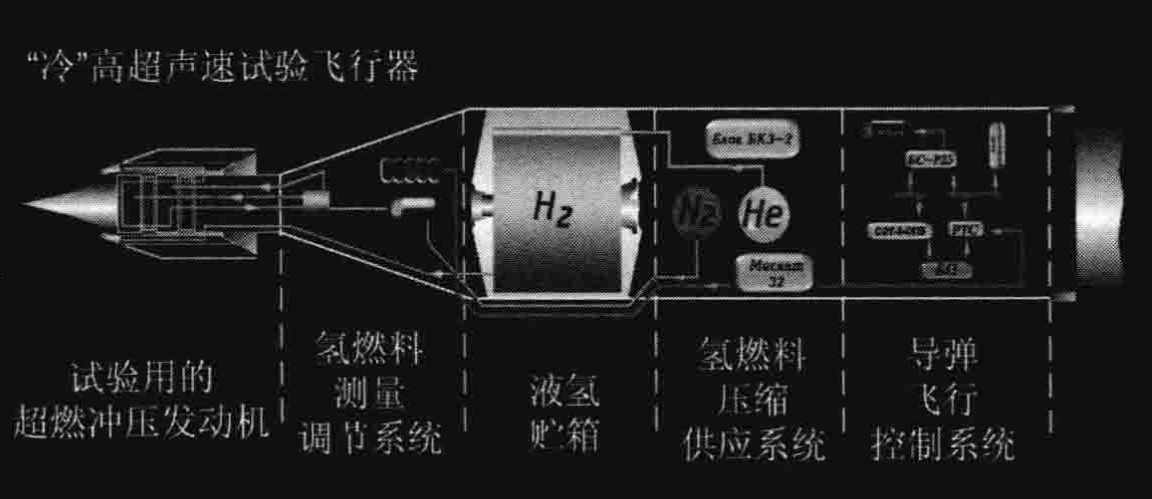
高超声速试验飞行器由苏联高空、远程防空导弹系统SA-5改装而成。
导弹为两级并联系统,4台固体火箭助推器捆绑在弹体的四周,主发动机采用液体燃料。将导弹战斗部及无关系统拆除,增加测量设备,发动机模型安装在导弹头部。
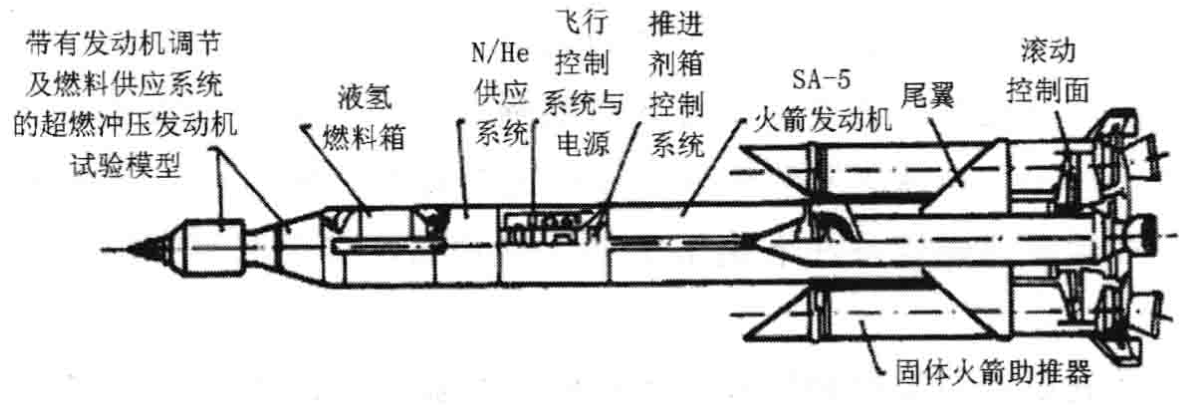
超燃冲压发动机试验飞行器以苏联SA-5防空系统的5V28导弹为基础改装完成的,导弹原来的战斗部换成飞行器的头部舱,里面放置了飞行控制系统、带有燃料挤压供给系统的液氢贮箱、带有测量装置的液氢流量调节系统,以及试验用的轴对称超燃冲压发动机。
试验与评价:
1991年11月28日的试验中,,试飞器最大飞行速度达到5.6Ma这是世界上首次在飞行试验中实现超声速燃烧,并成为当时的最高飞行速度。
这次的飞行试验极大促进世界高超声速技术应用研究的发展,也标志着俄在高超多技术领域取得了重大突破。
完成5次飞行试验后,考虑到轴对称亚超燃冲压发动机在实际应用时会碰到许多难以克服的困难,冷计划宣告已完成试验任务而终结。
3.2针计划
20世纪90年代初,俄罗斯中央空气流体动力研究所与中央航空发动机研究所共同开发了针试验飞行器。
试验目的:
针试器的气动性能类似于真实的高超声速飞行器,因此借助针试飞器可以研究流体动力学、热防护、真实高超声速飞行器及其动力系统的可控性和稳定性。
飞行器介绍:
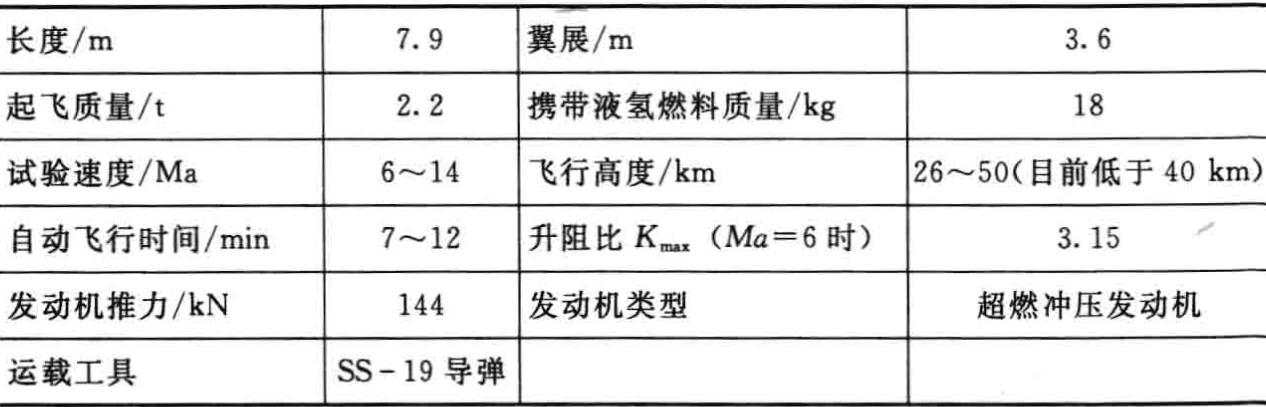
针试飞器是一种有翼高超声速试验飞行器
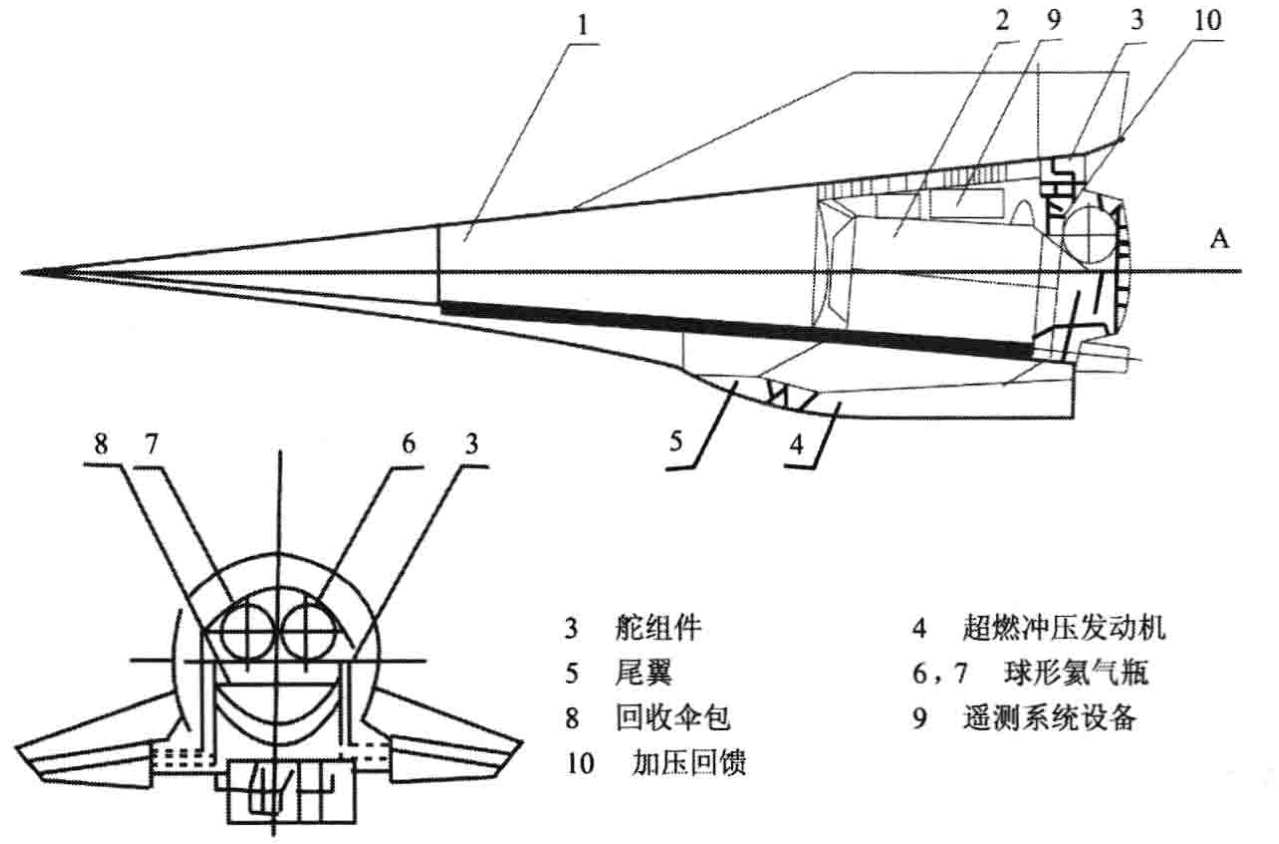
针试飞器由以下部件构成:机体(包括机身、三角机翼、带舵垂直尾翼)、超燃冲压发动机(3台,含燃料泵系统)、控制系统、遥测系统、方向舵作动系统、热控系统、电源系统、回收降落伞系统等。
关键技术:
- 气动外形
针试飞器采用升力体构型,在试飞器机体下方配置3台超燃冲压发动机。由于针超燃冲压发动机的工作特点,发动机和机身采用一体化结构。
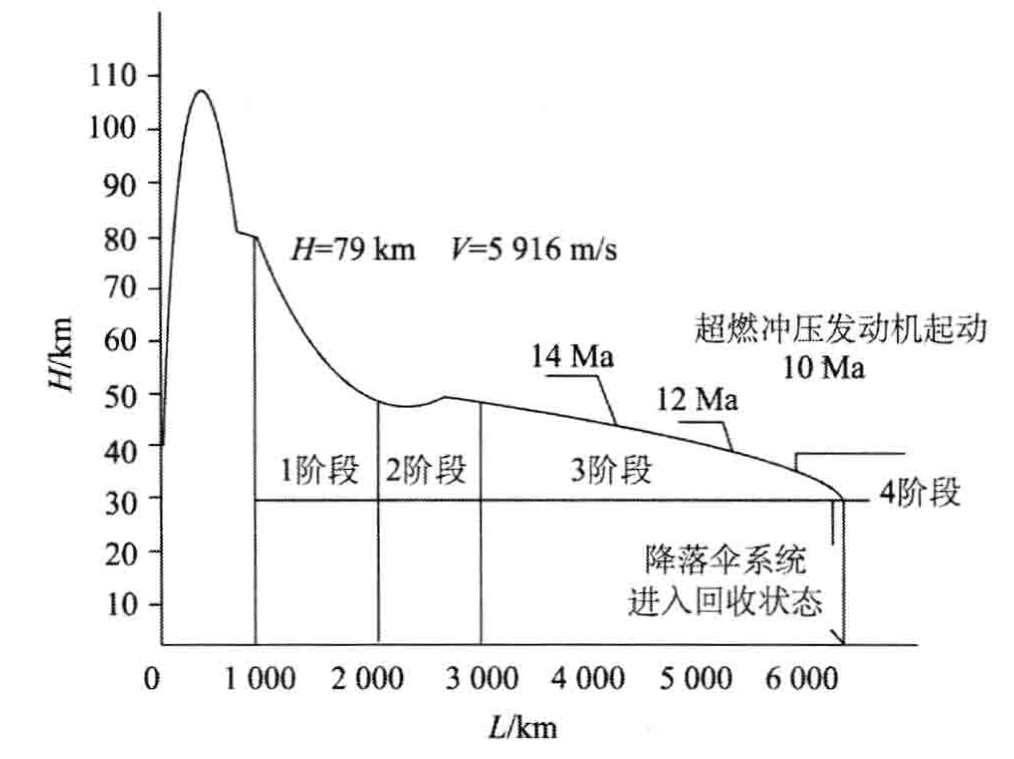
- 飞行弹道
针试飞器的飞行弹道由气动外形和飞行控制系统确定。
-
测量技术
- 在试飞器上安装了与 Navstar卫星导航系统连接的全球定位系统专用模块。
- 弹道参数测量由传统雷达跟踪系统和弹上惯性导航系统完成。
- 攻角和侧滑角由惯性控制系统测量,。
- 气动力根据机身周围气流参数确定,
-
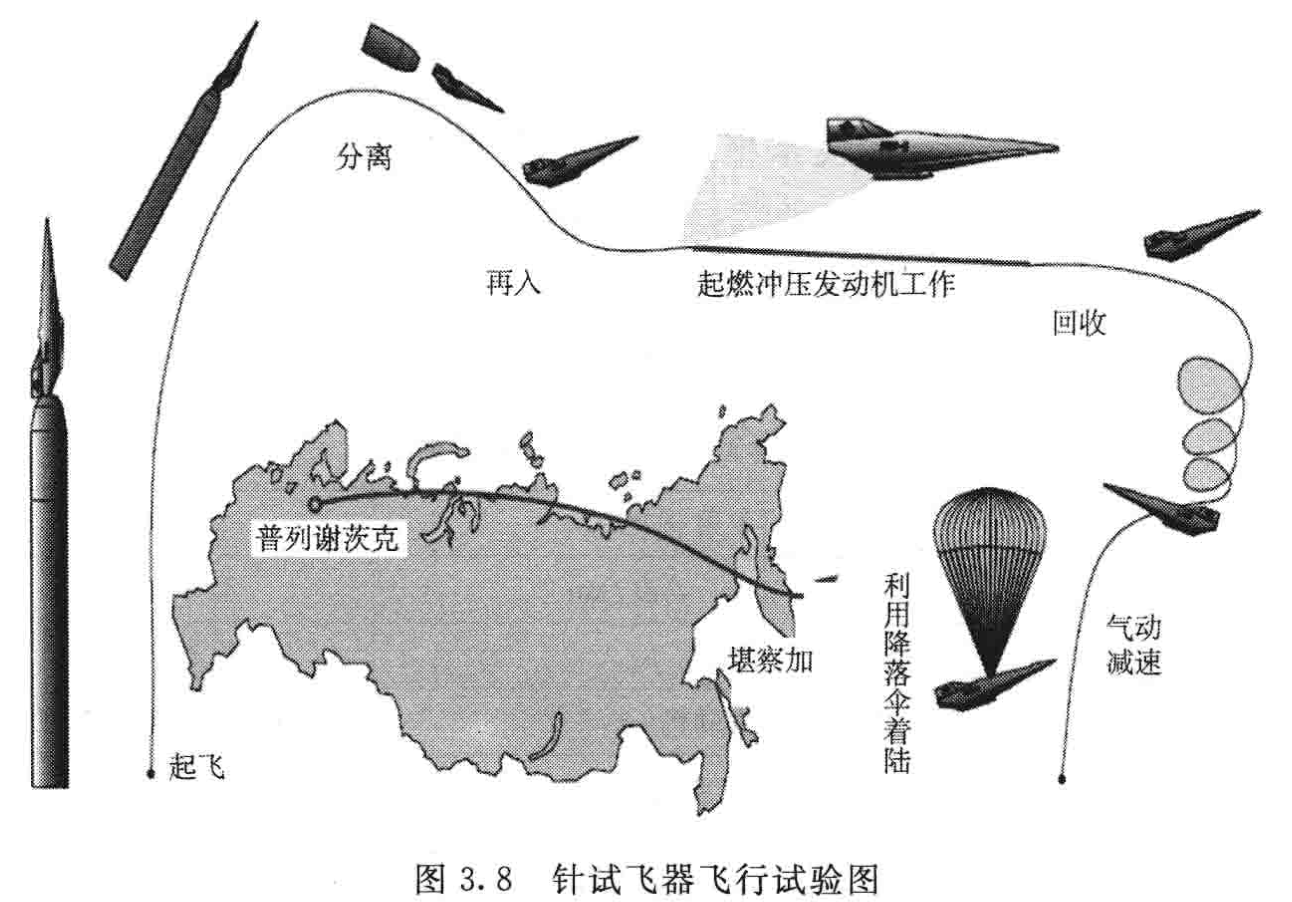
回收技术
针试飞器由降落伞回收,采用软着陆方式。
飞行试验与评价:
3.3彩虹-D2计划
20世纪90年代,彩虹设计局和中央流体动力研究所联合开展了彩虹-D2项目。
飞行器介绍:
关键技术:
试飞器的关键技术研究涉及到了气动外形和回收技术。
俄、德技术人员认为飞行器前机身受流体动力的作用明显,其几何形状对飞行器的整体性能具有重要影响。

计算结果表明,彩虹-D2-A前机身提供的一致流入条件对于带冲压发动机的飞行器比较有利。
而彩虹-D2-AB前机身的设计改善了纵向力矩。
飞行试验与评价:
从俄罗斯资料来看,彩虹-D2的飞行试验过程与HFL-31相似。
飞行器采用全弹回收方式,试飞器与试验发动机不分离,试飞器不能重复使用。回收系统比较复杂,采用三级降落伞回收,前两级减速,最后一级是主伞,回收降落。
3.4 HFL-31计划
HFL-31计划由多家单位参与
飞行器介绍:
HFL-31试飞器是在苏联防空导弹系统SA-10(俄罗斯系统代号C-300)基础上改装而成。
首先将该系统中的40H6E型导弹改装成空射助推火箭,在飞行试验时,改装的导弹挂在米格-31飞机腹部发射架上发射。在40H6E前弹体外侧,对称安装两台试验用超燃冲压发动机,前弹体卸去战斗部等无关设备后安装测试设备。
飞行试验:
试验模型曾进行过大量的地面试验,尚不清楚,其是否已经进行了实际的飞行试验。

为了验证超燃冲压发动机的实际效果,还必须进行高超声速试验飞行器的飞行试验,在大于6Ma,H=15~40Km高空的真实动压和飞行条件下。
3.5 GELA试验飞行器
GELA是在AS-19考拉超声速空射巡航导弹基础上改进而成,二者性能差别不大。

在20世纪70年代末,GELA的出现在一定程度上反映出了苏联准备发展高超声速技术的意向,也是将亚燃冲压发动机技术发展到极致的一个具体体现。
据资料报道,GELA试验飞行器长度比AS-19略短,而飞行速度则提高到4~5Ma。
3.6 GLL-31射手飞行器
GLL-31计划该项目是俄罗斯最早公开的高超声速飞行器项目。
主要进行速度2~9 Ma、高度18~35km的氢燃料和碳氢燃料超燃冲压发动机试验研究。
飞行器介绍:
-
试验用的超燃冲压发动机
- GLL-31所用的超燃冲压发动机由进气道、燃气室、喷管、燃料供应系统、点火装置、燃烧稳定系统、工作过程参数测量与记录系统组成。
-
超燃冲压发动机试验飞行器
- 圆柱形机身,头部为尖椎体,尾部无收缩。
- 机身前段两侧各有一个有下反角的截尖三角下单翼,机身尾部偏下两侧又分别有一个上反梯形尾翼和一个下反梯形尾翼,机身尾端略向后伸出发动机尾喷管。
- 发动机直接装在飞行器腹部。
飞行试验:
据悉,射手高超声速飞行器曾在2004年进行了首次飞行,此后的飞行试验的详细情况未见报道。
3.7 GLL-AP高超声速试验飞行器计划
GLL-AP高超声速试验飞行器使用碳氢燃料超燃冲压发动机,飞行器长5m(带助推器长9.5m),质量1450~1800kg(带助推器4800kg)。
试验飞行器用飞机挂载发射,由固体助推器加速到4.5Ma后启动超燃冲压发动机,飞行速度4~7Ma,飞行高度1235km。
3.8KH-90高超声速巡航导弹研制计划
在20世纪90年代初期,彩虹机械制造设计局研究新的KH-90高超声速巡航导弹。
导弹在7~ 20km高度与载机分离,此后打开折叠的三角翼和垂直尾翼,启动超燃冲压发动机燃烧室内部的固体火箭发动机,加速到超声速巡航发动机点火,以4~5Ma的速度巡航飞行。
俄罗斯KH-90导弹外形和技战性能一直是军事秘密,其研制进展也并未公开向外界透露。
3.9研制单位概况
巴拉诺夫中央发动机研究院
俄罗斯最大的研究机构之一,也是欧洲最大的发动机研究试验中心。喷气理论与优化发动机性能研究工作成绩突。
茹科夫斯基中央空气流体动力研究院
俄罗斯从事空气动力学和流体力学研究的重要的科研机构,是苏联航空航天工业的摇篮。
茹科夫斯基中央空气流体动力研究院的具体任务是从事飞行器空气动力学、结构强度方面的基础研究和应用研究,以及有关空气流体动力学的工业技术研究。其还负责编制国家航空技术大纲,参加制定试航性标准和其他一些国家规则性文件。
彩虹机械设计局
成立初期,彩虹设计局的研制方向是液体推进器和无人驾驶飞机。
60年代末期,彩虹设计局发展成苏联飞航导弹主要的研制和生产基地。
虹设计局研制的导弹采用先进的控制设备、弹上计算机技术和耐热材料,并实现了超声速飞行,因而使其产品达到了世界先进水平。
AS-15撑杆空对地巡航导弹和SS-N-22白蛉超声速反舰导弹是其杰出的代表。
彩虹设计局最重要的成果是掌握了超声速技术,提高飞行速度一直是彩虹设计局提高其飞行器有效性的主攻方向。平均每10年就能提高一倍声速。
3.10小结
俄罗斯冲压发动机的研究技术实力雄厚,在世界上独占鳌头。
苏联在发展飞航导弹武器上,走亚/超相结合的道路,有很多超声速飞航导弹服役。如SS-N-22(3M80)白蛉导弹、AS-17(X-31Π)反辐射导弹、SS-N-26宝石超声速反舰导弹等都是其中的代表。
冷计划在世界上首次实现在高空试验冲压发动机超燃工作模态,有着重大的政治意义与历史意义,标志着俄罗斯在这一学科的水平处于领先地位。
鹰(后改称为针)高超声速计划,是一个技术先进的计划该计划采用升力体一体化设计的布局,三模态冲压发动机结构,集合了许多多年来在高超声速技术领域的基础研究成果,有很大的吸引力。
第4章 临近空间高超声速飞行器发展规律及启示
- 技术上循序渐进、从易到难采用分步走的形式开展研究。
美国在开展高超声速技术研究的近50年历史中走了不少弯路,表现为早期过于乐观,虽然认识到了高超飞行器的重大战略价值,但制定的研制目标过高过泛,使得研制力量无法集中。而且没有对应用领域做出广泛深入的研究与论证,使得研究内容过分的偏重于某项性能的取得,而忽略了临近空间飞行器这一具有特殊运动模式的飞行器研究的系统化、针对性,所以并未明确这类飞行器的设计目标。使得某些项目在技术与实施上带有一定程度的局限性。
- 在继承的基础上不断创新。
从研究设计角度讲,这些高超声速飞行器的成熟型号技术载体无论从研究设计角度,还是从试验验证角度,都依靠其早前在相关型号中的突出表现很大程度上缓解了临近空间基础理论研究相对匮乏的压力,而且很多是具备共性的关键技术,这些技术经过梳理便可以灵活应用并直接服务于新的设计研究,而且通过成熟理论与关键技术的标定示范作用,使得设计高速临近空间飞行器领域的重点研究内容更加突出,取得了很好的标定作用,为设计与验证新的型号奠定了夯实的理论基础与技术储备。
- 研究高超声速飞行器应当做到动力先行
尽管各国的高超声速飞行器在应用方向和总体方案上千差万别,但动力系统均不约而同地采用了超燃冲压发动机技术。
目前已知的动力系统中只有超燃冲压发动机才能有效实现高超声速飞行。以超燃冲压发动机为中心的组合发动机是实现高超声速飞行的首选推进系统。
以涡轮发动机为基础的组合循环发动机(TBCC)和以火箭发动机为基础的组合循环发动机(RBCC),其中最核心的是超燃发动机技术。
国际上以美国CAV为代表的无动力滑翔类高速飞行器是另辟蹊径的一个发展途径,它暂时回避了高速动力这一瓶颈问题,但是对防/隔热和结构一体化技术的要求有所提高。
- 多家研究机构联合研究,充分发挥团体优势
高超声速技术涉及空气动力学、气动热力学、燃烧学、材料学等多个学科,是一个复杂交叉的前沿学术问题,如超声速燃烧基础理论、高超声速进气道技术等都是亟待研究与妥善解决的问题,必须联合优秀科研团体,才能产生优势研究成果。加强交流与合作,分担研制风险,是高超声速飞行器早日实现工程研制的可行的开发方式。
- 注重研究保障,不断加强基础设施的建设与发展
重视中间成果的验证和转化,不强调一次实现耐久性或完全可重复使用防热/热结构材料,边研制、边验证、边改善。实施系列飞行验证试验,强调数值、地面、飞行三者结合,通过地面试验和数值计算发展高超声速飞行器的设计/分析工具,通过相对简易飞行试验及时验证,认清机理,不断提高新型热防护材料的耐环境能力、技术成熟度和结构设计集成能力。
- 强调关键技术突破和飞行演示验证
演示验证机是在实验室和实用现场之间架起的双向桥梁,分阶段合理有效地实施演示验证计划,避免把太多的要求放在一个阶段里,可显著降低研制风险和节约成本。